O'z qo'lingiz bilan kamera bilan kvadrokopterni yig'ish uchun siz yig'ishni ikki bosqichga bo'lishingiz kerak. Birinchi bosqich - kvadrokopterni o'zi yig'ish. Ikkinchisi unga kamerani ulashdir.
Shunday qilib, birinchi bosqich.
Kvadrokopterni DIY yig'ish retsepti
Kvadrokopterni yig'ish uchun bizga quyidagilar kerak bo'ladi:
- to'rtta kvadrokopter dvigateli;
- to'rtta tezlikni regulyatori;
- to'rtta parvona (parvona), zaxira bilan;
- quvvat ajratgich 3,5 mm;
- kvadrokopterni boshqarish uchun USB orqali sozlanishi plata;
- parvozingizdan maksimal darajada foydalanish uchun to'rtta yoki undan ortiq batareya;
- batareyalarni zaryadlash uchun zaryadlovchi;
- kvadrokopterni boshqarish moslamasi (qabul qiluvchi va uzatuvchi bilan birga sotiladi);
- qabul qilgichni kvadrokopterning "miyalariga" ulash uchun qo'shimcha platalar;
- motorlar uchun silikon qoplamali simlar, har biri ikkitadan, qizil va qora;
Bu mexanizmlar va boshqaruvlar haqida.
DIY kvadrokopter ramkasi
Bizning kvadrokopterimiz parvozda o'zini ishonchli his qilishi uchun u barcha boshqaruv mexanizmlari tayanadigan qandaydir skelet bilan jihozlangan bo'lishi kerak. Ushbu muammoni hal qilishda ikkita yondashuv mavjud:
- kvadrokopter uchun tayyor ramka;
- o'zingiz yig'adigan ramka;
Eng ko'p tanlash uchun mos variant siz uchun ba'zi nuanslarni tushunishingiz kerak. Agar siz tayyor ramka sotib olsangiz, unda, qoida tariqasida, siz allaqachon hamma narsani burab, uni parvozga qo'yishingiz mumkin. Ammo agar biron bir qism yiqilib yoki ehtiyotsizlik tufayli shikastlangan bo'lsa, uni etkazib berishni kutish uchun biroz vaqt kerak bo'ladi. kuryerlik xizmatlari manzilingizga.
O'z qo'llaringiz bilan doğaçlama vositalardan tayyorlangan ramkaga kelsak, bu holda siz hamma narsani silliq kesib, uni yopishtirish uchun tinker qilishingiz kerak bo'ladi. Har qanday voqea sodir bo'lgan taqdirda, singan qismni osongina almashtirish mumkin.
Improvizatsiya qilingan vositalardan ramka yasashning eng keng tarqalgan varianti plastik quvurlar, ular qurilishda simlarni ulash uchun ishlatiladi. Ularning xususiyatlari barchani mahkamlash uchun idealdir zarur elementlar boshqaruv elementlari, dvigatellar. Ularni (motorlarni) mahkamlash uchun siz simlarni ulashda quvurlarni devorlarga mahkamlash uchun ishlatiladigan mahkamlagichlardan foydalanishingiz mumkin.
Bunday quvurlar yordamida u juda yaxshi chiqadi yaxshi dizayn, unda siz kvadrokopter va kameraning barcha qismlarini ishonchli tarzda o'rnatishingiz mumkin. Shunday qilib, bizda deyarli kamerali o'z-o'zidan ishlaydigan kvadrokopter bor, qolgani hammasini to'g'ri yig'ish va sinov parvozlariga borishdir.
Kamerali DIY kvadrokopteri: yig'ish jarayonining videosi
O'z qo'llaringiz bilan kvadrokopterni yig'ishning butun jarayoni ushbu videoda keltirilgan. Ko'raylikchi.
Quyida men Internetda topilgan fotosuratlar. Ular o'z qo'llari bilan improvizatsiya qilingan materiallardan yig'ilgan kamerali kvadrokopterlarni taqdim etadilar.
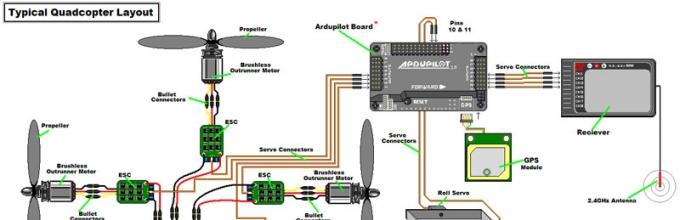
Butun kvadrokopterning elektronikasini qanday ulash mumkin
Men ruslashtirilgan ko'rsatmalarni topa olmadim, bu ko'rsatmani siz uchun ingliz tilidan rus tiliga tarjima qilgan do'stimga rahmat.


Dvigatellarni ulashda siz simlarni kengaytirish usuli yordamida uzaytirishingiz kerak bo'ladi. Siz har qanday mos simlardan foydalanishingiz mumkin, lekin afzalroq "silikon". Bu, agar siz to'satdan qishda Yangi yil feyerverk namoyishini videoga olishni istasangiz, past haroratlarda yorilib ketmaslikka imkon beradi.
Dasturiy ta'minot yordamida kvadrokopterni o'rnating va "o'rgating"
Shunday qilib, biz o'z qo'llarimiz bilan kamerali kvadrokopterni yig'dik, qolgan narsa mashinamizni parvozda o'zini to'g'ri tutishga o'rgatishdir. Buning uchun uni "o'rgatish" kerak. Bu qanday amalga oshiriladi? Juda oddiy! Mikrodasturni USB orqali plataga yuklashingiz kerak. Siz ushbu proshivkani ixtisoslashgan forumda yoki bizning veb-saytimizda topishingiz mumkin. Mikrodastur bilan maqola chop etilganda, bu yerda proshivkaga bosiladigan havola paydo bo'ladi.
Agar siz hali kvadrokopterda qanday uchishni bilmasangiz va o'rganishni istasangiz, men ushbu mavzu bo'yicha maqola yozaman, ayniqsa siz uchun. Havola shu yerda paydo bo'ladi. U erda men kvadrokopterni boshqarish xususiyatlari haqida gapiraman va qaysi biri professional kabi uchishni o'rganish uchun eng tezdir.
Ikkinchi bosqichga kelsak, bu erda siz faqat narx va sifat jihatidan o'zingiz uchun mos deb hisoblagan kamerani biriktirishingiz kerak. Video sharhlarida siz mos kamerani topasiz, agar bo'lmasa, pastki chap burchakda joylashgan chatga yozing, boshqa foydalanuvchilar sizga aytadilar.
Ushbu maqolaning oxirida men sizga o'z qo'lingiz bilan kamera bilan kvadrokopterni yig'ish bo'yicha yana bir videoni tomosha qilishni taklif qilaman.
- Oʻquv qoʻllanma
Men butun yig'ish va sozlash jarayonini tasvirlab berdim va quyida oldingi maqolalarimdan qo'shimcha ma'lumotlarni o'z ichiga olgan biroz o'zgartirilgan versiya bo'ladi.
Men bu sevimli mashg'ulotga kirish masalasini savoldan tashqarida qoldiraman va to'g'ridan-to'g'ri kvadrokopterga o'taman.
Kvadrokopter o'lchamini tanlash
Bir yil oldin 250 o'lchamli kvadrokopterlar eng ommabop edi. Ammo endi uchuvchilar kichikroq qurilmalarni yig'ishni afzal ko'rishadi, bu juda o'rinli: og'irligi kamroq, lekin quvvat bir xil. Men 180 o'lchamini hech qanday amaliy sabablarga ko'ra emas, balki yig'ishning bir turi sifatida tanladim.
Aslida, tanlovga bunday yondashuv mutlaqo to'g'ri emas. Avval pervanellarning o'lchamini, keyin esa ularning ostida tanlangan pervanellar mos keladigan eng kichik ramkani tanlash ancha oqilona. Va bu yondashuv bilan 180 formati odatda rad etiladi. O'zingiz baho bering: 210 formati 250 bilan bir xil 5 dyuymli pervanellarni o'rnatishga imkon beradi, to'rtburchakning o'zi esa engilroq va 4 dyuymli pervaneler 160 kvadratga mos keladi. Ma'lum bo'lishicha, 180-o'lcham "na bizniki, na sizniki" oraliq formatdir. Bundan tashqari, uni 160 vaznli deb hisoblash mumkin. Ammo, shunga qaramay, men uni tanladim. Ehtimol, bu GoPro yoki Runcam kamerasini ko'proq yoki kamroq qulay tarzda olib yurishi mumkin bo'lgan minimal o'lchamdir.
Aksessuarlar
Dvigatellardan boshlaylik. 180 ning "oraliq" o'lchami, shuningdek, ularning assortimentining boyligi tanlovni qiyinlashtiradi. Bir tomondan, siz 160-yillarda, boshqa tomondan, 210-da yoki hatto 250-da o'rnatilgan narsalarni olishingiz mumkin. Siz pervanellardan va batareyadan (konservalar soni) boshlashingiz kerak. Men 3S batareyadan foydalanishning ma'nosini ko'rmayapman, lekin pervaneler uchun umumiy qoidalar quyidagilar:
- sizga maksimal statik tortish kerak - pervanel diametrini oshiring va qadamni kamaytiring (o'rtacha chegaralar ichida)
- sizga yuqori tezlik kerak - diametrini kamaytiring va balandlikni oshiring (o'rtacha chegaralar ichida)
- sizga kichik diametrli yuqori bosim kerak - pichoqlar sonini qo'shing (yana o'rtacha chegaralar ichida, chunki ikki va uch qanotli pervanellar o'rtasidagi farq sezilarli bo'lsa, uch va to'rt kanatlilar orasida u unchalik katta emas)
Mening holimda, menda 4 dyuymli pervanel o'lchami chegarasi bor, lekin vosita chegarasi yo'q. Bu shuni anglatadiki, eng aqlli narsa uch qanotli 4045 bullnose pervanellaridan foydalanish bo'ladi. Ularni muvozanatlash qiyin, lekin ular boshqaruvni sezgir va bashoratli qiladi va ovoz tinchroq. Boshqa tomondan, ikki qanotli pervanellar bilan kvadrokopterning tezligi yuqoriroq, lekin menga, albatta, kerak emas. "Odamlar" 180 kadrda quyidagi sozlamalardan foydalanadi:
- 1306-3100KV dvigatellar, an'anaviy 4045 pervanellar va 850mAh batareya bilan engil vazn
- og'ir va kuchli uch qanotli bullnose pervanellari va 2205-2600KV dvigatellari va 1300mAh batareyali harakat kamerasi uchun
Aslida, ramka 1306-4000KV dan 22XX-2700KV gacha bo'lgan motorlarni o'rnatishga imkon beradi. Aytgancha, men nima uchun ekanligini bilmayman, lekin 1806-2300KV motorlar endi yoqmaydi va kam ishlatiladi.
To'rtligim uchun men motorlarni oldim - RCX H2205 2633KV. Birinchidan, men quvvat zaxirasiga ega bo'lishni xohlardim (garchi o'zimning kamtarona uchish qobiliyatim bo'lsa ham, nima uchun bu noma'lum). Ikkinchidan, mening sozlamalarim hech qachon o'ta engil bo'lib chiqmagan, bundan tashqari, men ham harakat kamerasini olib yurishni rejalashtirmoqdaman. Xususan, RCX motorlari murosaga kelish variantidir. Ular arzon, ammo sifati haqida ko'p shikoyatlar mavjud. Komponentlarni sotib olayotganda, bu bozorda 2205-2600 kV kuchlanishli bir nechta motorlardan biri edi. Endi (yozish vaqtida) assortiment juda katta va boshqa narsani tanlash yaxshidir.
Qolgan komponentlar bilan men "ko'proq qiyinchilik" tamoyili bo'yicha harakat qildim:
Parvoz boshqaruvchisini tanlash
Ro'yxatda parvoz boshqaruvchisi yo'qligini payqagandirsiz. Men uning tanlovini batafsilroq tasvirlab bermoqchiman. Arzon qurilish to'plamlari ko'pincha CC3D kontrollerini o'z ichiga oladi, shuning uchun endi bu eng arzon kompyuterdir. Bugungi kunda CC3D-ni sotib olishning mutlaqo ma'nosi yo'q. U eskirgan va batareyani boshqarish va signal kabi zarur narsalarga ega emas. Uning vorisi, CC3D Revolution, boy imkoniyatlarga ega, ammo narxi 40 € dan yuqori bo'lgan butunlay boshqacha mahsulotdir.
Zamonaviy parvoz kontrollerlari allaqachon F1 protsessorlaridan F3 protsessorlariga o'tishgan, bu Naze32 ni oxirgi avlod shaxsiy kompyuteriga aylantirdi va uning narxini sezilarli darajada pasaytirdi. Endi bu haqiqatan ham sizning yuragingiz xohlagan deyarli hamma narsani 12 € dan boshlanadigan narxga ega bo'lgan xalq nazoratchisi.
Yangi avlod shaxsiy kompyuterlaridan Seriously Pro Racing F3 eng ommabop hisoblanadi, bu birinchi navbatda arzon klonlarning mavjudligi bilan bog'liq. Tekshirish moslamasining o'zi hech qanday holatda Naze32 dan kam emas, bundan tashqari, u tezkor F3 protsessoriga, katta hajmdagi xotiraga, uchta UART portiga va S.Bus uchun o'rnatilgan inverterga ega. Men tanlaganim SPRacingF3 Acro edi. Boshqa zamonaviy kompyuterlar narxi yoki ba'zi o'ziga xos xususiyatlari (yopiq proshivka, tartib va boshqalar) tufayli hisobga olinmadi.
Alohida-alohida, men bir nechta taxtalarni bittaga birlashtirishning hozirgi moda tendentsiyasini ta'kidlamoqchiman. Ko'pincha kompyuter va OSD yoki shaxsiy kompyuter va PDB men bir nechta istisnolar bilan bu fikrni qo'llab-quvvatlamayman. Men butun parvoz boshqaruvchisini almashtirishni xohlamayman, chunki OSD yonib ketgan. Bundan tashqari, amaliyot shuni ko'rsatadiki, ba'zida bunday birlashma muammolarni keltirib chiqaradi.
Ulanish diagrammasi
5V yoki 12V quvvatga muhtoj bo'lgan barcha komponentlar uni quvvat taqsimlash kengashining BEC-laridan olishi aniq. Kamera nazariy jihatdan to'g'ridan-to'g'ri 4S batareyadan quvvatlanishi mumkin, chunki kirish voltaji bunga imkon beradi, lekin hech qanday holatda buni qilmaslik kerak. Birinchidan, barcha kameralar regulyatorlarning kontaktlarning zanglashiga olib keladigan shovqiniga juda sezgir, bu esa rasmda shovqinga olib keladi. Ikkinchidan, faol tormozli regulyatorlar (masalan, mening LittleBees), bu tormozlash yoqilganda, bort tarmog'iga juda jiddiy impuls beradi, bu esa kamerani yoqib yuborishi mumkin. Bundan tashqari, impulsning mavjudligi to'g'ridan-to'g'ri batareyaning aşınmasına bog'liq. Yangilarida yo'q, lekin eskilarida bor. Mana, tarbiyaviy video regulyatorlarning aralashuvi va ularni qanday filtrlash haqida. Shuning uchun kamerani BECdan yoki video uzatgichdan quvvatlantirish yaxshiroqdir.
Bundan tashqari, tasvir sifatini yaxshilash uchun nafaqat signal simini, balki kameradan ekranga ulash simini ham ulash tavsiya etiladi. Agar siz bu simlarni pigtailga aylantirsangiz, er signal simi uchun qalqon vazifasini bajaradi. To'g'ri, bu holatda men buni qilmadim.
Biz "tuproq" haqida gapirayotganimiz sababli, odamlar ko'pincha "tuproq" ni regulyatorlardan shaxsiy kompyuterga ulash kerakmi yoki bitta signal simi etarlimi yoki yo'qmi haqida bahslashadi. Oddiy poyga kvadrokopterida u albatta ulanishi kerak. Uning yo'qligi sinxronizatsiya xatolariga olib kelishi mumkin ( tasdiqlash).
Yakuniy ulanish sxemasi sodda va ixcham bo'lib chiqdi, ammo bir nechta nuanslar mavjud:
- regulyatorlar uchun chiqishlar orqali PDB dan parvoz boshqaruvchisini (5V) quvvat bilan ta'minlash
- OI_1 ulagichi orqali kompyuterdan radio qabul qiluvchining (5V) quvvat manbai
- PDB dan video uzatuvchi quvvat manbai (12V).
- video uzatgichdan kamera quvvat manbai (5V).
- OSD UART2 ga ulangan. Buning uchun ko'p odamlar UART1 dan foydalanadilar, ammo Naze32-da bo'lgani kabi, bu erda bu ulagich USB bilan parallel.
- Vbat OSD ga emas, balki shaxsiy kompyuterga ulangan. Nazariy jihatdan, batareya kuchlanishini (vbat) o'qishni batareyani biriga yoki boshqasiga ulash orqali ham OSD, ham kompyuterda o'qish mumkin. Nima farqi bor? Birinchi holda, o'qishlar faqat monitor ekranida yoki ko'zoynakda bo'ladi va kompyuter ular haqida hech narsa bilmaydi. Ikkinchi holda, kompyuter akkumulyator batareyasining kuchlanishini kuzatishi, bu haqda uchuvchiga xabar berishi (masalan, signal bilan), shuningdek, ushbu ma'lumotlarni OSD, "qora quti" ga va telemetriya orqali masofadan boshqarish pultiga uzatishi mumkin. Bundan tashqari, kompyuter orqali o'qishlarning aniqligini sozlash osonroq. Ya'ni, vbatni parvoz boshqaruvchisiga ulash ancha afzaldir.

Assambleya
Boshlash uchun, bir nechta umumiy maslahat yig'ish uchun:
- Uglerod oqim o'tkazadi. Shunday qilib, hamma narsa yaxshi izolyatsiyalangan bo'lishi kerak, shunda hech narsa hech qanday joyda ramkaga qisqaradi.
- Ramkadan tashqariga chiqadigan har qanday narsa baxtsiz hodisada sinishi yoki yirtilib ketishi mumkin. Bunday holda, biz, birinchi navbatda, ulagichlar haqida gapiramiz. Simlar ham vint bilan kesilishi mumkin, shuning uchun ular ham yashirin bo'lishi kerak.
- Lehimlashdan so'ng, barcha taxtalarni bir necha qatlamlarda PLASTIK 71 izolyatsion lak bilan qoplash tavsiya etiladi. O'z tajribamdan aytamanki, suyuq lakni cho'tka bilan qo'llash uni buzadigan amallar bilan qo'llashdan ko'ra ancha qulayroqdir.
- Simlar taxtalarga lehimlangan joylarga ozgina issiq eritilgan elim tushirish zarar qilmaydi. Bu lehimni tebranishlardan himoya qiladi.
- Barcha tishli ulanishlar uchun Loctite o'rta fiksatsiyasidan (ko'k) foydalanish tavsiya etiladi.
Men yig'ishni motorlar va regulyatorlar bilan boshlashni afzal ko'raman. yaxshi video kichik kvadrokopterni yig'ish bo'yicha, men undan motor simlarini joylashtirish g'oyasini qabul qildim.
Men regulyatorlarni o'rnatish haqida alohida aytmoqchiman: qaerda va nima bilan? Ular nurga va uning ostiga o'rnatilishi mumkin. Men birinchi variantni tanladim, chunki bu holatda regulyator ko'proq himoyalanganga o'xshaydi (bu mening taxminlarim, amaliyot bilan tasdiqlanmagan). Bundan tashqari, nurga o'rnatilganda, regulyator pervaneldan havo bilan mukammal sovutiladi. Keling, regulyatorni qanday himoya qilish haqida gapiraylik. Ko'p usullar mavjud, eng mashhurlari ikki tomonlama lenta + bir yoki ikkita zip bog'lash. "Arzon va quvnoq" va demontaj qilish hech qanday qiyinchilik tug'dirmaydi. Eng yomoni shundaki, bunday mahkamlash bilan siz regulyator platasiga (agar siz unga bog'lab qo'ysangiz) yoki simlarga (agar siz ularni mahkamlab qo'ysangiz) zarar etkazishingiz mumkin. Shuning uchun men regulyatorlarni issiqlik qisqaradigan quvurlar (25 mm) bilan biriktirishga qaror qildim va ularni nurlar bilan birga lehimladim. Bitta ogohlantirish bor: regulyatorning o'zi ham issiqlik qisqarishida bo'lishi kerak (menda sotilgan), kontaktlar nurning uglerod tolasi bilan aloqa qilmasligi uchun, aks holda qisqa tutashuv bo'ladi.

Bir parchani yopishtirish ham mantiqiy ikki tomonlama lenta motor o'rnatilgan joyda har bir nur ustida pastdan. Birinchidan, u motor podshipnikini changdan himoya qiladi. Ikkinchidan, agar biron sababga ko'ra murvatlardan biri bo'shab qolsa, u parvoz paytida tushmaydi va yo'qolmaydi.
Ramkani yig'ishda men to'plamdagi bitta murvatni ishlatmadim, chunki ularning barchasi juda qisqa edi. Buning o'rniga, men uni biroz uzunroq va boshi ostida sotib oldim Phillips tornavida(bu shaxsiy imtiyoz).
Kamera ramkaning yon plitalari orasiga kengligi bo'yicha mos kelmadi. Men uning taxtasining chetlarini fayl bilan ozgina qayta ishladim (to'g'rirog'i, men qo'pol qirralarini zımpara qildim) va u hech qanday muammosiz turdi. Ammo qiyinchiliklar shu bilan tugamadi. Menga Diatone-dan kamera ushlagichining sifati juda yoqdi, lekin u bilan kamera balandligi bo'yicha (taxminan 8-10 mm) ramkaga to'g'ri kelmadi. Avvaliga neopren amortizator orqali plastinkaning tashqi (yuqori) tomoniga ushlagichni biriktirdim, lekin dizayn ishonchsiz bo'lib chiqdi. Keyinchalik uni oddiy va sodda qilish g'oyasi paydo bo'ldi ishonchli mahkamlash. Men faqat Diatone o'rnatish moslamasidan qisqich oldim va uni M3 ipli novda bo'lagiga qo'ydim. Kamera yon tomonga siljishining oldini olish uchun qisqichni neylon yenglar bilan mahkamladim.

Menga lehimlash kerak bo'lgan shaxsiy kompyuterdagi yagona ulagichlar regulyatorlar uchun ulagichlar bo'lganligi juda yoqdi. To'liq uch pinli ulagichlar balandlikka to'g'ri kelmadi, shuning uchun men hiyla-nayrangga murojaat qilishim va ikki pinli konnektorlardan foydalanishim kerak edi. Dastlabki beshta kanal uchun (regulyatorlar uchun 4 ta + 1 "har holda") men ulagichlarni signal paneliga va erga, qolgan uchtasi uchun - plyus va erga lehimladim, shunda kompyuterning o'zi va undan quvvatlanadi. - orqa yorug'lik. Parvoz boshqaruvchilarining Xitoy klonlari USB ulagichining ishonchsiz o'rnatilishidan aziyat chekayotganini hisobga olib, men buni ham lehimladim. SPRacingF3 klonining yana bir xususiyati tweeter ulagichidir. Vbat holatida bo'lgani kabi, taxtaning yuqori tomonida ikki pinli JST-XH ulagichi mavjud va pastki qismida u kontaktli prokladkalar bilan ko'paytiriladi. Gap shundaki, klon konnektorda doimiy tuproqqa ega va undan foydalanganda signal har doim faol bo'ladi. Tvitter uchun oddiy ish joyi faqat kontakt paneliga ulangan. Bu sinovchi tomonidan osongina tekshirilishi mumkin: ulagichning "ortiqcha" kontakt panelidagi "ortiqcha" ga ulangan, ammo "minus" ulanmagan. Shuning uchun, kompyuterning pastki qismiga "o'q ovozi" uchun simlarni lehimlashingiz kerak.

Regulyatorlarning uch pinli ulagichlarini ham almashtirish kerak edi. To'rtta ikkita pinli vilkadan foydalanish mumkin edi, lekin buning o'rniga men ikkita to'rt pinli vilkani oldim va barcha regulyatorlarning "tuproq" ni biriga, signal simini ikkinchisiga (motorlarni ulash tartibiga rioya qilgan holda) joylashtirdim.

Orqa yoritilgan plastinka ramkadan kengroq va yon tomonlardan chiqadi. Pervanellar uni yiqilmaydigan yagona joy - bu ramka ostida. Men jamoaviy dehqonchilik bilan shug'ullanishim kerak edi: men uzun murvatlarni oldim, ularga oldindan tayyorlangan teshiklari bo'lgan neylon muftalarni qo'ydim (yorug'likni mustahkamlovchi bog'ichlar mahkamlanishi uchun) va ularni pastki plastinka orqali ramka ustunlariga vidaladim. Natijada paydo bo'lgan oyoqlarga (plastinkadagi teshiklar juda mos keladi) LEDlar bilan plastinka biriktirish uchun zip bog'ichlardan foydalandim va rishtalarni issiq elim bilan to'ldirdim. Men plastinaning orqa tomoniga ulagichlarni lehimladim.
Yig'ishdan so'ng, sozlash bosqichida, tvitterda nimadir noto'g'ri ekanligi ma'lum bo'ldi. Batareyani ulagandan so'ng darhol u monoton xirillashni boshladi va agar siz uni masofadan boshqarish pultidan faollashtirgan bo'lsangiz, unda bu monoton chiyillash ritmikga o'rnatilgan. Avvaliga men kompyuterda xatoga yo'l qo'ydim, lekin kuchlanishni multimetr bilan o'lchaganimdan so'ng, muammo aniq qaerda ekanligi aniq bo'ldi. Aslida, oddiy LEDni tweeter simlariga ulash boshidanoq mumkin edi. Natijada, men bir vaqtning o'zida bir nechta tvitlarga buyurtma berdim, ularni tingladim va eng baland ovozni o'rnatdim.


Ko'pincha PDB va boshqaruvchi neylon murvatlar bilan ramkaga biriktirilgan, ammo men ularning kuchiga ishonmayman. Shuning uchun men 20 mm metall murvat va neylon muftalardan foydalandim. PDBni o'rnatgandan so'ng, men regulyatorlarga quvvat manbaini lehimladim (qolgan simlar oldindan lehimlangan) va lehim joylarini issiq elim bilan to'ldirdim. Baxtsiz hodisa yuz berganda uzilib qolmasligi uchun batareyaga boradigan asosiy elektr simini galstuk bilan romga mahkamladim.

Qabul qilgichdan barcha ulagichlarni pense bilan olib tashladim, bundan tashqari uchta talab qilinadi, va uchinchi va to'rtinchi kanallar orasidagi jumperni to'g'ridan-to'g'ri taxtada lehimli. Yuqorida yozganimdek, ulagichlarsiz qabul qilgichni olish oqilona bo'lardi. Men uning antennalarini ham ochdim va ularni issiqlik bilan qisqartirdim. Ramkada qabul qilgich PBD va orqa raf o'rtasida yaxshi joylashadi. Ushbu tartibga solish bilan uning ko'rsatkichlari aniq ko'rinadi va bog'lash tugmasiga kirish imkoniyati mavjud.

Men video uzatgichni fermuarli bog'ichlar va issiq elim bilan ramkaning yuqori plastinkasiga mahkamlab qo'ydim, shunda u orqali kanalni almashtirish tugmasi va LED ko'rsatkichlariga kirish mumkin edi.

Video uzatuvchi antennani o'rnatish uchun ramkada maxsus teshik mavjud. Lekin siz uni to'g'ridan-to'g'ri transmitterga ulamasligingiz kerak. Bu o'ziga xos tutqich bo'lib chiqadi, bu erda bir qo'l antenna, ikkinchisi esa barcha simlar bilan uzatgichning o'zi va ulagichning biriktirilgan joyi maksimal yukni ko'taradigan tayanch nuqtasi bo'ladi. Shunday qilib, voqea sodir bo'lgan taqdirda, deyarli 100% ehtimollik bilan, uzatuvchi platadagi ulagich uzilib qoladi. Shuning uchun siz antennani qandaydir adapter yoki uzatma kabeli orqali ulashingiz kerak.
Men to'g'ridan-to'g'ri simlarni emas, balki MinimOSD-ga ulagichlarni lehimlashga qaror qildim. Ular forumlarda bu kengash tez-tez yonib ketishi haqida yozishadi, shuning uchun darhol mumkin bo'lgan almashtirishga tayyorgarlik ko'rish oqilona. Men ikkita qatorda ulagichlari bo'lgan chiziqni oldim, pastki qismini teshiklari bo'lgan kontakt yostiqchalariga lehimladim va vIn va vOut ni yuqorisiga olib keldim. Shundan so'ng, men lehimli bo'g'inlarni issiq elim bilan to'ldirdim va butun taxtani issiqlik qisqarishiga solib qo'ydim.

Yakuniy teginish - bu telefon raqami bo'lgan stiker. Bu kvadrokopter yo'qolgan taqdirda ozgina umid beradi.

Endi majlis o‘z nihoyasiga yetdi. Bu ixcham bo'lib chiqdi va shu bilan birga barcha kerakli boshqaruv elementlariga kirish imkoniyatini saqlab qoldi. Siz ko'proq fotosuratlarni ko'rishingiz mumkin
Havaskor uchuvchilar kvadrokopterni o'z qo'llari bilan qanday yig'ish haqida o'ylashlari sabablari har xil. Misol uchun, kimdir narxlardan qoniqmaydi, kimdir hech qanday gimbalga o'rnatilmagan o'z kamerasini o'rnatmoqchi, boshqalari faqat poyga uchun konfiguratsiya olishni xohlaydi. Siz boshqa nima bilasiz!
Zamonaviy foydalanuvchilar yuqoridagi savolga shaklda keng qamrovli javob olishni afzal ko'rishadi bosqichma-bosqich tavsiyalar. Va agar ularga video formatida ko'rish imkoniyati berilsa, bundan ham yaxshi. Chunki diagrammalar va ko'rsatmalar ko'p hollarda yig'ish paytida barcha muhim qismlarni to'liq ochib bermaydi.
Kvadrokopterni qanday qilishni tushunish uchun o'z qo'llarim bilan, keling, qurilishning har bir bosqichida biz qanchalik ko'p ishlarni amalga oshirganimiz va hali qancha ish qilishimiz kerakligi haqida tushunchaga ega bo'lishimiz uchun katta rasmni ko'rib chiqaylik. Bu jarayonni davom ettirish va yakunlashni osonlashtiradi, chunki ko'pincha qancha ish qolganligini tushunmaslik yangi boshlovchi dizaynerni yarmidan voz kechishga majbur qiladi.
Shunday qilib, keling, birinchi navbatda o'z qo'llaringiz bilan kvadrokopterni yig'ish uchun to'plamga kiritilishi kerak bo'lgan samolyotning barcha asosiy qismlarini eslaylik. Aqlga keladigan birinchi narsa, albatta, dronning korpusi bo'lib, uning ustiga boshqa barcha jihozlar va elektronika joylashtiriladi.
Kosonni noldan yig'ish umuman qiyin emas. Misol uchun, agar an'anaviy kvadrokopterlarning korpusi nimadan yasalganiga nazar tashlasak, ishlab chiqaruvchilar material sifatida plastmassadan foydalanishini ko'ramiz. Plastik eng ko'p qirrali va mos material har qanday dronning tanasi va nurlarini yig'ish uchun.
U engil bo'lib, uni ko'proq saqlashga imkon beradi uzoq muddatli batareya zaryadi. Albatta, plastik eng ko'p, deb aytish mumkin emas ishonchli vositalar favqulodda qulashda multikopterni shikastlanishdan himoya qilish uchun. Ammo umuman olganda, bu haqda o'ylab ko'rsangiz, hatto katta samolyotlar ko'proqdan yasalgan bardoshli material, bo'laklarga bo'linadi. Shu sababli, biz engil plastmassadan unchalik talabchan bo'lmaymiz, uning asosiy vazifasi, birinchi navbatda, parvoz paytida korpus ichidagi elektronika va aksessuarlarni mahkam o'rnatishdir.
Agar siz ushbu materialdan nurlar va korpus elementlarini yasash imkoniga ega bo'lmasangiz, shuningdek, boshqa uchuvchisiz transport vositalarining zaxira quvurlari yoki nurlari bo'lmasa, oddiy kontrplakga e'tibor berishni tavsiya etamiz. Albatta, siz butunlikni tanlamasligingiz kerak tolali plitalar, chunki hech qanday motor yoki dvigatel bunday og'ir tuzilmani ko'tarolmaydi. Ishingiz uchun engilroq variantni qidiring.
Kontrplak ham yaxshi, chunki kopterning aerodinamik xususiyatlarini yaxshilash, shuningdek, unga turli xil kopter bloklarini kiritish uchun har qanday miqdordagi teshiklarni burish mumkin. Ular dvigatellar va pervanellar uchun bir xil bloklar, simlar va qo'nish moslamalari uchun mahkamlagichlar, bo'limlar bo'lishi mumkin. elektron taxtalar, batareyalar va videokameralar.
Shundan so'ng, tayyor korpusga elektron va bosilgan elektron platalarni o'rnatish haqida o'ylashingiz kerak. Bu sizga qurilmani yig'ishda uning o'rtasidan harakatlanish imkonini beradi. Bunday hollarda pechdan raqsga tushishni yaxshi ko'radilar. Ya'ni, kvadrokopterdagi eng muhim narsadan.
Nurlarning har birida simlar va motorlar mukammal tarzda o'rnatilishi uchun maxsus belgilar qo'yilishi kerak. Yig'ilgan qurilmangiz qanchalik silliq va muvozanatli uchishi bunga bog'liq. Bir necha millimetrlik xatolik uchish vaqtida dronning kuchli dumalab yoki egilishiga olib kelishi mumkin. Dvigatellarni o'rnatishdan oldin aniq o'lchovlarni bajaring va ularni bir necha marta tekshiring.
Oxirida siz qilishingiz kerak bo'lgan yagona narsa dronning barcha komponentlari o'rtasida aloqa o'rnatish - ular o'rtasida simlar shaklida ulanishni chizish. Umumiy tavsiyalar Qanday qilib aloqa o'rnatishni o'rganish uchun o'qing. Shuni qo'shimcha qilish kerakki, dronning dastlabki yig'ilishi shu erda tugaydi. Hamma narsani to'g'ri bajarganingizga va xatolar bo'lsa, ishonch hosil qilish uchun erda va havoda ko'plab sinovlarni o'tkazish qoladi va menga ishoning, ular albatta amalga oshiriladi, tuzatishlar kiritiladi.
Keyinchalik, sizning kopteringiz bortida qanday muhim komponentlar bo'lishi kerakligini aytib beramiz, shunda siz o'zingizning havo "uyingizni" qaerdan qurishni boshlashingiz kerakligini va nimani bilishingiz kerak. muhim tafsilotlar yordam beradi. Shundan so'ng, sizda "o'zingiz va uyda kvadrokopterni qanday yig'ish kerak" kabi barcha savollar bo'lmaydi. Ma'lum bo'lishicha, bu unchalik qiyin emas. Eng muhimi, dronning tuzilishi va uning parvoz tamoyillarini bilishdir.
Kvadrolet nima?
Hali bilmaganlar uchun bu konstruksiya, platforma, inshoot, samolyot, qaysi biri siz uchun qulayroq bo'lsa, u (agar biz platforma haqida gapiradigan bo'lsak) transmitter tomonidan boshqariladi. Bir xil miqdordagi pervanelli 4 ta dvigatelga ega. Bunday samolyotlarni yig'ish, albatta, uchuvchi ko'p dvigatelli platformani o'z ichiga oladi.
Dron havoga ko'tarilgach, u gorizontal holatni egallaydi. Vertolyot kabi u yer yuzasidan turli balandliklarda uchib yurishga qodir. U turli yo'nalishlarda uchadi. Ilgari kopterlar faqat burni tomon ucha olar edi. IN so'nggi yillar Ular Boshsiz tipdagi modellarni yasashni boshladilar, bunda uchuvchisiz uchish paytida uchuvchisiz uchish paytida to'rt yo'nalishning istalganiga burnini o'sha tomonga burilmasdan keskin ucha oladi.
Kopter ko'tarilishi va tushishi mumkin, shu bilan birga u har doim erga nisbatan gorizontal holatda qoladi. Agar unga maxsus uskunalar o'rnatilgan bo'lsa, ba'zi hollarda u hatto avtopilot rejimida ham uchishi mumkin. Aksariyat aviatsiya ixlosmandlari bunday imkoniyatlardan, birinchi navbatda, hozirgi vaqtda havodan suratga olishga e'tibor berishadi, balki butun dunyoga o'zlarining aerobatika mahoratini namoyish etish uchun emas.
Dronning umumiy ishlash printsipi

Yuqorida aytib o'tganimizdek, tizim ko'p rotorli. Xuddi shu rotorlar qarama-qarshi yo'nalishda kuchli diagonal aylanish hosil qiladi. Rotorlarda uchta yoki oltita giroskopdan ma'lumot to'playdigan (ikkinchisining soni kopterning konfiguratsiyasiga bog'liq) va uni rotorlarga uzatadigan boshqaruvchi deb ataladi.
Giroskoplar parvoz paytida qurilmaning holatini avtomatik aniqlash va keyin uni uchta tekislikda mahkamlash uchun yaratilgan. Shu bilan birga, akselerometr kopterning ideal gorizontal holatni egallashiga ishonch hosil qiladi. Kvadrokopterni ma'lum balandlikda mahkamlash uchun parvoz tizimi barometr bilan jihozlangan.
Shu sababli, agar barcha to'rtta pervanel teng aylansa, kopter harakat qiladi. Bir yoki boshqa dvigatel juftlarining aylanish tezligini o'zgartirish natijasi kopterning eng zaif aylanadigan pervanellarga egilishi (bu "rulon" deb ham ataladi) - dron gorizontal ravishda uchadi.
Ko'pgina hollarda, qat'iy to'rtta rotor mavjud, lekin ba'zida siz olti yoki hatto sakkizta rotorli kopterlarni topishingiz mumkin. Shuning uchun ular multikopterlar deb ataladi va "kvadrokopter" so'zi ko'p rotorli dronlarning so'nggi ikki vakiliga endi tegishli bo'lmaydi.
Oddiy dronni yig'ish bo'yicha ko'rsatmalar
 O'zingizning to'rttangizni yig'ishda aqlga kelgan birinchi narsa, albatta, uning ramkasi. Ushbu element bilan hech qanday murakkab narsa yo'q. Uning asosi uchun 15 kvadrat santimetr o'lchamdagi oddiy kontrplak mos keladi. Nurlar ramkangizning diagonal belgilari bo'ylab vintlar yordamida o'rnatiladi. Nurning uzunligi kopterning markazidan boshlab 30 santimetr bo'lishi kerak. Nurlar 25 sm. Dvigatellarning o'zlari uchun teshiklar korpusni yaratish oxirida, avval dvigatellar uchun markirovka qilingan holda ajratiladi.
O'zingizning to'rttangizni yig'ishda aqlga kelgan birinchi narsa, albatta, uning ramkasi. Ushbu element bilan hech qanday murakkab narsa yo'q. Uning asosi uchun 15 kvadrat santimetr o'lchamdagi oddiy kontrplak mos keladi. Nurlar ramkangizning diagonal belgilari bo'ylab vintlar yordamida o'rnatiladi. Nurning uzunligi kopterning markazidan boshlab 30 santimetr bo'lishi kerak. Nurlar 25 sm. Dvigatellarning o'zlari uchun teshiklar korpusni yaratish oxirida, avval dvigatellar uchun markirovka qilingan holda ajratiladi.
Va bu erda yig'ilishning o'zi uchun foydali bo'lgan narsa:
- Turnigy 9 texnologiyasi;
- Boshqarish paneli;
- Turnigy uchun batareyalar;
- Quvvat batareyasi;
- Pichoqlar;
- Har xil batareya zaryadlovchilari.
Keling, yig'ishni boshlaylik

Avvalo, biz boshqaruv panelini o'rnatamiz. Shu bilan birga, uni platformangizning markaziga iloji boricha yaqinroq joylashtiring. Eng boshidanoq kerakli, eng muhimi, aniq o'lchovlarni oling. Bunday holda, qurilma parvoz paytida u yoqdan bu tomonga siljimaydi. Nurlarni taxtaga burama qilish uchun etarli uzunlikdagi o'z-o'zidan tebranish vintlarini ishlating. Alyuminiy tasma chang'ilarni qo'yish va batareyani ushlab turish uchun javob beradi.
Qabul qilgichni taxtaga yaqin o'rnating. Qabul qilgichni o'rnatish uchun siz ba'zi kuchli superglue foydalanishingiz mumkin. Ikkita uch simli kabel bilan ulanishning soddalashtirilgan versiyasi, agar qabul qiluvchi kanallar boshqaruv platasining kanallari bilan bir xil bo'lsa, mumkin. Shuni yodda tuting.
Dvigatel o'rnatish
 Uni joylashtirishdan oldin siz nurlarning aniq belgilarini qilishingiz va dvigatelning o'zi uchun teshiklar qilishingiz kerak. Qirralardan aylanish o'qigacha bo'lgan masofa ekvivalent ekanligiga ishonch hosil qiling. Hech bo'lmaganda iloji boricha. Dvigatelni o'rnatishda uning pastki qismidan milning dumi chiqib ketadi, shuning uchun siz uning uchun maxsus teshik qilishingiz kerak.
Uni joylashtirishdan oldin siz nurlarning aniq belgilarini qilishingiz va dvigatelning o'zi uchun teshiklar qilishingiz kerak. Qirralardan aylanish o'qigacha bo'lgan masofa ekvivalent ekanligiga ishonch hosil qiling. Hech bo'lmaganda iloji boricha. Dvigatelni o'rnatishda uning pastki qismidan milning dumi chiqib ketadi, shuning uchun siz uning uchun maxsus teshik qilishingiz kerak.
Mahkamlash uchun teshik ochganda, kvadratning butun kengligi bo'ylab va butun yo'l bo'ylab burg'ulash. Shunda siz milning bu kvadratning chetlariga yopishib olishini darhol ko'rishingiz mumkin.
Simlarni ulash
Adapterlardan foydalanib, 4 ta quvvat simini parallel ulang. Batareya to'rtta simga ulanadigan joyda siz olinadigan ulanishlardan foydalanishingiz kerak bo'ladi. Boshqa joylarda lehim kerak bo'ladi. Keyin barcha qismlarni issiqlik bilan qisqartiring, shunda kuchli tebranish paytida (kopter uchayotganda) hech narsa sakrab chiqmaydi va ajralib qolmaydi.
Endi boshqaruv platasida ishlaymiz va haydovchi simlarini ulaymiz. Asos sifatida, ushbu operatsiyadan so'ng siz kichik tekshirishni amalga oshirishingiz va sinov paytida aniqlangan muammolarni bartaraf etishingiz mumkin.
Kvadrokopterni o'zingiz yig'ishning ikkinchi usuli

Birinchi samolyotingizni qanday yig'ishingizdan qat'i nazar, bir narsani eslab qolishingiz kerak - dronni yig'adigan qismlarga pul ayamang. Faqat bu holatda, ehtimollik darajasi yuqori bo'lsa, natija yuqori sifatli bo'ladi va kichik noaniqliklar va xatolar kechiriladi.
Kvadrokopterni ikkinchi usulda yig'ishda biz ko'rib chiqamiz bosqichma-bosqich variant Arduino Mega, Mega-Pirate proshivkasi yordamida yig'ish.
Yig'ish uchun nima kerak? 5 ta motor, shu jumladan 1 ta zaxira. Shuningdek, ikkita pichoq to'plamini sotib oling - biri foydalanish uchun, ikkinchisi zaxira uchun. Sizga ikkita bo'lishi kerakligini eslatamiz an'anaviy vint va ikkita teskari aylanish bilan. Tezlik regulyatorlari. Ularning kamida to'rttasi bo'lishi kerak va yana kamida zaxiralari bo'lishi kerak.
Kopterni og'irlashtirmasligi uchun bunday dron uchun kichikroq batareyani olish yaxshiroqdir.
Biz bir nechta engil va kichiklardan foydalanishni tavsiya qilamiz. Ha, dron bir vaqt ichida kamroq uchadi hayot davrasi bunday mini-batareya, lekin ayni paytda sizning parvozingiz yanada barqaror bo'ladi. Bundan tashqari, batareyani almashtirish jarayoni ko'p vaqt talab qilmaydi.

Kvadrokopteringiz uchun ramka engil va ayni paytda bardoshli bo'lishi kerak. Birinchi holatda qanday ramka tasvirlanganimizni eslang o'z-o'zini yig'ish. Shunday qilib, bunday ramka bu variant uchun juda mos keladi. Elektron to'ldirishdan sizga kerak bo'ladi: barchasi birida plata, akselerometr, batareyalar, mikrokontroller, giroskop, shuningdek, ko'plab murvatlar, vintlar, simlar va har xil turlari parda Lehimlash temir va matkap haqida ham unutmang.
Sizga kerak bo'lgan hamma narsaga ega ekanligingizga ishonch hosil qilganingizdan so'ng, yig'ishni xavfsiz boshlashingiz mumkin. Yig'ish jarayoni yuqorida tavsiflangan birinchi usul yordamida takrorlanishi mumkin. Eng muhimi shundaki, nurning har bir uchidan ramkaning markaziga masofa bir xil bo'ladi. Pervanellar bir-biriga va eng muhimi, ramkaning markaziy qismiga tegmasligiga ishonch hosil qiling, chunki bu erda sizning droningizning elektron miyalari, shuningdek, videokamera, aytmoqchi, o'rnatish mumkin bo'ladi. bo'ladi.

Agar siz datchiklaringizni kauchuk yoki, aytaylik, silikon massasiga o'rnatsangiz, pervanellarning ishlashi paytida tebranish kuchi susayadi. Shassi sifatida ko'pikni nurlarning eng uchlarida yasash va mahkamlash mumkin. Ko'proq ma'lumot uchun yumshoq qo'nish ular kauchuk yoki ko'pikli kauchuk bilan biriktirilishi mumkin.
Agar siz taxtani o'zingiz yig'ishni xohlamasangiz, biz tayyor mahsulotni sotib olishni maslahat beramiz. Unda allaqachon 4 ta datchik o‘rnatilgan, burchak tezlanishini o‘lchaydigan giroskop, tezlanishni o‘lchaydigan akselerometr, kerakli balandlikni tanlash uchun mas’ul bo‘lgan va kvadrokopterni o‘zida ushlab turadigan barometr, shuningdek dron qayerda ekanligiga javob beradigan magnitometr o‘rnatilgan. uchadi.
O'z qo'lingiz bilan arzon Arduino Uno kvadrokopterini qanday qurish mumkin
Agar ergashsangiz qisqacha ko'rsatmalar Quyida keltirilgan Arduino Uno yig'ilishiga ko'ra, siz uchuvchisiz to'rt nurli qurilma bo'lib, 30 daqiqalik parvoz vaqtiga ega bo'lib, motordan dvigatelgacha 60 santimetr (152 dyuym) o'lchaydi. Uning vazni bir kilogrammdan biroz ko'proq bo'ladi.
Ramka uchun siz odatdagidan kesilgan nozik nurlardan foydalanishingiz kerak yog'och taxtalar. Bunday nurlardan bittasining taxminiy qalinligi yuqoridan 1-1,5 santimetr va yon tomondan nurga qaraganda taxminan 3-4 santimetr bo'lishi kerak. Har birining uzunligi 60 santimetr bo'lgan ikkita bir xil bo'lak hosil qiling va ulardan birining markazida teshikni kesib, ikkala nurni bir-biriga mahkam bog'lang. Siz ularni lehimlashingiz, yopishtirishingiz va hokazo.
Shundan so'ng, sizning qulayligingiz uchun siz nurlarni ikkita rang bilan bo'yashingiz mumkin turli ranglar. Masalan, oldingi ikkita nurni sariq rangga, yig'ilgandan so'ng dronning orqa tomoniga aylanadigan nurlarni qizil yoki qora rangga bo'yang.
Quvvat platasini ramkangizning birlashmasiga o'rnatish kerak bo'ladi. U markazda, xochning pastki qismida o'rnatilishi kerak. Uzunligi sozlanishi mumkin bo'lgan plastik tasmalardan foydalanib, ushbu taxtani ikkala tomondan korpusga mahkamlang. Bu taxtaning yiqilishiga yo'l qo'ymaslik va uning asosiy maqsadini barqaror bajarish uchun etarli bo'ladi. Uning o'rnidan bir necha millimetr yoki hatto 1 santimetrga siljishi va siljishi mumkinligi bilan chalkashmang.
Shundan so'ng, siz HobbyKing-dan 4 ta elektron tezlik regulyatorini o'rnatishingiz kerak bo'ladi - har biri atigi 16 gramm. Ularni har bir nurning chetiga mahkam bog'lab qo'ying. Quvvat platasini mahkamlagan bir xil plastik sozlanishi tasma bu maqsad uchun juda mos keladi. Ko'pgina hollarda, har bir kontroller uchun faqat bitta tasma etarli. Ammo agar siz bunga shubha qilsangiz, xavfsizlik uchun yana bir yoki hatto ikkita kamar qo'shishingiz mumkin.
Har bir nurning oxirida siz dvigatellar va pervanellarni o'rnatadigan teshikli maxsus qopqoqni biriktirishingiz kerak. Shunga qaramay, tasmalarni mahkamlash materiali sifatida foydalaning. Dvigatellarni birinchi marta ishga tushirganingizda yiqilmasligi uchun qopqoqni mahkam mahkamlang. Aytgancha, elektron tezlikni nazorat qilish moslamasini nurning yuqori qismiga o'rnatish yaxshiroqdir. Bu uning pervanel bilan o'zaro aloqasini yaxshilaydi va ular o'rtasida aloqa o'rnatishni osonlashtiradi.
Bir nechta muhim elektron elementlardan yig'ilgan boshqaruv paneli (yig'ish diagrammasi uchun rasmga qarang) plastik tasmalar yordamida yuqori qismga biriktirilgan. Har bir nurga mahkam yopishtirish uchun taxtangizning to'rt tomonida ikkita teshik bo'lishi kerak.

Oxir-oqibat, uy qurilishi to'rtligingizning markaziy qismida ikkita taxta bo'ladi. Ulardan biri o'rnatishning pastki qismida o'rnatilgan quvvat paneli, ikkinchisi - kopteringizning kesishgan nurlarining yuqori qismiga o'rnatilgan boshqaruv paneli.
To'liq bo'lmagan dvigatellarning tebranishini yumshatish va bostirish uchun yaxshi ta'sir elektronikangiz uchun tebranishga qarshi amortizatorlar yasashingiz kerak. Ushbu maqsadlar uchun siz oddiy silikon quloqchalardan foydalanishingiz mumkin. Ular har qanday dorixonada sotiladi. Har bir boshqaruv platasining tagiga o'rnatish uchun sizga to'rtta quloq tiqinlari kerak bo'ladi.
Buni qilishning eng yaxshi usuli quyidagicha. Kengashingizning to'rt tomonining har birida mustahkamlovchi tasmalarni mahkamlashni boshlashdan oldin, silikon vilkani taxtaning o'zi ostiga qo'ying va baribir nur ustiga qo'ying. Bunday holda, u ushbu ikki qattiq element o'rtasida o'ziga xos qistirma vazifasini bajaradi va tebranishni o'zlashtira oladi.
Quloq tiqinini taxta va multikopter shpal o'rtasida mahkamlash uchun taxtadagi teshiklarga plastik tasma soling, quloq tiqinini tekislang va tasmani mahkam torting, shunda u nafaqat mahkamlashi mumkin. bosilgan elektron plata krossovkada, balki ikkala tomondan vilkaning o'zini ham bosdi.

Endi batareyalarni o'rnatishni boshlaylik. Ikkita Zippy Compact batareyasidan foydalanishingiz mumkin. Ularning har birining quvvati 3700 milliamper soatni tashkil qiladi. Agar siz ikkalasini ham ishlatsangiz, u ikki baravar ko'payadi. Natijada, biz 7400 mAh quvvatga ega bo'lamiz va deyarli 30 daqiqa to'liq parvoz qilamiz. Shunga qaramay, ushbu ikkita batareya dronning asosiy yukiga aylanishini yodda tutish kerak. Ularning umumiy og'irligi 517 grammni tashkil qiladi.
Batareyalarni mahkamlash uchun sizga lenta va uzun plastik tasma kerak bo'ladi (faqat bitta, lekin oldingi qismlarni mahkamlaganingizdan kengroq). Batareyalar diagonal holatda bo'ladigan tarzda biriktirilishi kerak, ya'ni ular ikkala nurga emas, balki bir vaqtning o'zida ikkalasiga ham biriktiriladi.
Bu aniq eng yaxshi joy buning uchun markazda bir xil xoch bo'ladi. Nazorat o'rtasida beri bosilgan sxema va xochning o'zi qoladi bo'sh joy, quloqchalar balandligi tufayli olingan, batareyalarni tuzilishga ulash uchun faqat bu bo'shliqqa tasma kiritishingiz kerak bo'ladi.
Bundan oldin, siz bir batareyani ikkinchisining ustiga qo'yishingiz kerak va ustiga oddiy yumshoq shimgichni qo'shishingiz kerak, bu esa sindiriladigan qismlarni tashish, ularning ostidan plastik tasmani o'tkazish va ustiga kuchli lentani yopishtirish uchun ishlatiladi. Bu batareyalar sirg'alib ketmasligi uchun tasmani joyida ushlab turadi va batareyalarni bir-biriga yopishtirib qo'yishga yordam beradi. Ishonchliligi uchun siz batareyalarni qirralarning bo'ylab bir-biriga yopishtirish uchun lentadan ham foydalanishingiz mumkin, ammo bu allaqachon ixtiyoriy.
Keyinchalik, biz batareyalarni korpusning pastki qismiga mahkam joylashtiramiz va tasmani yuqoridan taxta ostidagi teshikka joylashtiramiz. Biz uni mahkam bog'laymiz. Agar kerak bo'lsa, biz strukturani kuch uchun yana tekshiramiz. Shimgich shuningdek, strukturaning pastki qismidagi to'rtburchaklar, batareyalar va quvvat paneli o'rtasida paydo bo'lishi mumkin bo'lgan tebranish uchun yumshatuvchi vazifasini bajaradi.
Nurlarning uchlaridagi maxsus qopqoqlar endi 25 mm motorlarni o'rnatish va ularga pervanellarni o'rnatish uchun ishlatilishi mumkin. Sizning ramkangiz allaqachon ikkiga bo'yalgan turli ranglar, qurilmaning old tomoni va orqa tomoni qayerda ekanligini yaxshiroq navigatsiya qilish uchun. Ammo aniqroq yo'nalish uchun siz to'q sariq yoki oq stol tennisi to'pidan foydalanishingiz mumkin.
Buni amalga oshirish uchun siz bir oldingi nurdan ikkinchisiga oddiy simni o'tkazishingiz va har bir uchini taxminan tezlikni regulyatorlari ostida mahkamlashingiz kerak. Telning markazida allaqachon mahkam bog'langan to'p bo'lishi kerak.
Mana, sizning Arduino uchishga tayyor. Yuqorida aytib o'tilganidek, uning parvoz og'irligi 1054 gramm edi. Ushbu vaznda parvoz vaqti 30 daqiqa va bir necha soniya.
Kvadrokopterni loyihalashda qo'nish moslamasining mavjudligi hisobga olinmagan. Asosan, ular kerak emas, chunki dronning qornida kamera o'rnatilmagan va batareyalarni himoya qilish va ular uchun oyoqlarni biriktirish bilan bezovtalanishning hojati yo'q. 30 daqiqalik parvoz tugashini aniq hisoblab, tizimni o‘z vaqtida yerga yumshoq tarzda qo‘ndirsangiz bo‘ldi. Shunday qilib, siz qurilmani tasodifan katta balandlikdan qulashdan himoya qilasiz, chunki sizda hech qanday joyda batareyalaringizning zaryadlanish holati haqida xabar beruvchi sensorlar bo'lmaydi.
Mikrodasturni sozlash
Bugungi kunda kerakli proshivkani topish, yuklab olish va o'rnatish juda oson. Uni Arduino-ga yuklaganingizdan so'ng, konfiguratsiya uchun dasturni yuklab oling. Dasturni ishga tushirgandan so'ng, siz "Options" menyusiga o'tasiz, u erda Arduino COM portiga kiring va Action menyusiga o'ting - AC2 Setup. ATVni sozlash to'g'ri bo'lishini ta'minlash uchun dasturni o'rnatish va ishlash jarayonida ko'rsatmalarga (maslahatlarga) bexato rioya qilishga harakat qiling.
Misol uchun, bir dialog sizdan transmitterdagi tutqichlarni eng yuqori va eng past qiymatlarga o'tkazishingizni so'raydi, boshqasi esa samolyotning holatini nazorat qilishni so'raydi. Datchiklarni aniq kalibrlash uchun u tekis bo'lishi kerak.
 Kalibrlash tugagach, siz GND dan A5 ni ochishingiz kerak bo'ladi. Menyuda, AC2 Sensor elementida, sensorlar to'g'ri ishlayotganligini tekshirish uchun Raw Sensor yorlig'ini toping. Bunday holda, siz o'qga e'tibor qaratishingiz kerak. Bizning taxtamizni aylantirganda, o'q kerakli qiymatga yetishi kerak. Agar bu sodir bo'lmasa yoki aksincha, miqyosdan chiqib ketsa, sizda koddagi sensorlar yoki koeffitsientlar bilan bog'liq muammolar mavjud.
Kalibrlash tugagach, siz GND dan A5 ni ochishingiz kerak bo'ladi. Menyuda, AC2 Sensor elementida, sensorlar to'g'ri ishlayotganligini tekshirish uchun Raw Sensor yorlig'ini toping. Bunday holda, siz o'qga e'tibor qaratishingiz kerak. Bizning taxtamizni aylantirganda, o'q kerakli qiymatga yetishi kerak. Agar bu sodir bo'lmasa yoki aksincha, miqyosdan chiqib ketsa, sizda koddagi sensorlar yoki koeffitsientlar bilan bog'liq muammolar mavjud.
Transmitter quyidagi tarzda tekshiriladi. Agar darajalar kutilganidek harakatlansa, gaz dastagini bir necha soniya o'ngga va pastga bosganingizda, qizil diod miltillaydi. Agar siz tayoqni yuqoriga siljitsangiz, ko'rsatkichlar bir xil bo'lishi kerak, ya'ni LED yana qizil yonishi kerak.
Yechish; uchib ketish
Uchish vaqti keldi. Buni amalga oshirishdan oldin, multikopterni sizdan taxminan 10-12 metr masofada o'rnating. Gaz kelebeğini pastga va o'ngga burang. Kopter uchishi kerak bo'ladi. Buning o'rniga u statsionar bo'lsa, pervanellar ishlayotgan bo'lsa va u titrayotgan bo'lsa, unda tegishli menyuda PID konfiguratsiyasini sozlashingiz kerak bo'ladi.
Multikopter samolyotining birinchi sinovlari 1922 yilda bo'lib o'tgan, ammo faqat 21-asrning ikkinchi o'n yilligida. bu turdagi tartib ta'sirchan sur'atlarda mashhurlikka erisha boshladi. Boshqa radio boshqariladigan modellar bilan solishtirganda, kvadrokopterlar katta talabga ega, ehtimol ular amaliy maqsadga ega: hech bo'lmaganda havodan chiroyli suratga olish.
Iste'molchilar talablaridan so'ng, ishlab chiqaruvchilar bozorni turli xil xususiyatlarga ega turli xil konfiguratsiyalarning ko'plab modellari bilan to'ldirishmoqda. Ko'pgina xaridorlar oddiy kalibrlashdan keyin havoga ucha oladigan RTF (uchishga tayyor) to'plamlarini afzal ko'rishadi.
Ammo hamma ham oson yo'lga muhtoj emas. Kvadrokopterni noldan mustaqil ravishda yig'ishdan alohida zavq olish mumkin. Murakkablik darajasi yig'ish uchun barcha kerakli qismlarga ega bo'lgan to'plamlardan har bir komponentni o'zingiz tanlash, ularning muvofiqligini tekshirish, shaxsiy UAVni yig'ish va sozlashgacha o'zgarib turadi.
Zavod modellari moslashtirilmagan maxsus dastur stsenariylari mavjud bo'lsa, kvadrokopterni yig'ish ham mantiqiy. Yoki o'zingiz sindirishga qarshi bo'lmagan parvozlarni o'rgatish moslamasini yig'ing. Buning uchun batafsil chizma kerak emas, unda barcha elementlar belgilangan eskiz etarli.
Asosiy birliklar va komponentlar
Qurilgan qurilma hech bo'lmaganda nazariy jihatdan havoga ko'tarilishi va kvadrokopterni o'z qo'llaringiz bilan yig'ishni zavqlantirishi uchun siz bir qator tegishli qismlarni sotib olishingiz kerak:
- Parvoz boshqaruvchisi kelajakdagi UAVning "boshi" bo'lib, unda barcha asosiy zarur sensorlar o'rnatilgan, shuningdek ularning o'qishlarini qayta ishlash uchun dasturiy ta'minot, shuningdek, har bir dvigatelning aylanish tezligini boshqarish uchun boshqaruv panelidan keladigan buyruqlar. Bu kvadrokopterni yig'ish uchun sotib olishingiz kerak bo'lgan eng qimmat komponent.
- Ilg'or modelerlar ramkani o'zlari sinchkovlik bilan tanlangan materiallardan (alyuminiy, plastmassa, yog'och, karbonat yoki ularning kombinatsiyalaridan) yasashadi. Agar tajriba yoki muhandislik bilimlari etishmasligi bo'lsa, agar tayyor ramka loyihaga ko'proq mos keladigan bo'lsa yoki kvadrokopter va uning qismlarini o'zingiz loyihalashtirishga na xohish va na vaqt bo'lsa, unda tayyor ramkalar keng doirada ishlab chiqariladi. o'lchamlar qatori yordamga keladi.
- Cho'tkasi bo'lmagan motorlarni tanlash yaxshidir - ular bir oz qimmatroq, ammo cho'tkasi bo'lgan motorlarga qaraganda ancha ishonchli. Parvozlar uchun sezilarli tezlikda aylanish kerak, shuning uchun kollektorning yo'qligi xizmat muddatiga ijobiy ta'sir qiladi. Kamida 4 ta (yoki 8 ta, agar sizga oktokopter kerak bo'lsa) sotib oling, agar byudjet imkon bersa, 1-2 ta zaxira bilan.
- Dvigatel boshqaruvchilari, har bir dvigatelning aylanish tezligini tartibga soluvchi va uni quvvat bilan ta'minlaydigan ushbu platalar korpusning "nurlariga" o'rnatiladi. Ularning soni dvigatellar soniga to'g'ri keladi.
- Pervaneler yoki propulsorlar bilan tanlanishi kerak alohida e'tibor, chunki o'lcham mustaqil ravishda qurilgan yoki sotib olinganligidan qat'i nazar, kelajakdagi ramkaning o'lchamlariga mos kelishi kerak.
- Quvvatni taqsimlash paneli batareyadan quvvatni vosita tezligini regulyatorlariga taqsimlash uchun mo'ljallangan. Qoida tariqasida, har bir sotib olingan quti kichik taxta bilan jihozlangan, unda siz barcha kontrollerlarning kirishlarini lehimlashingiz va keyin ularni ehtiyotkorlik bilan quvvatlantirishingiz mumkin. Agar so'ralsa, kvadrokopter sxemangiz tartib xususiyatlarini talab qilsa, asosiy quvvat platasining yanada rivojlangan versiyasiga buyurtma berishingiz mumkin.
- Batareyalarni sotib olish ehtiyot qismlarni tanlashda eng qiyin daqiqalardan biridir. Tegishli batareyaning turi butunlay yaratilgan modelning maqsadiga bog'liq. Tez modellar uchun yuqori KV (daqiqada inqiloblar × Volts) bo'lgan kichik batareyalarni olish yaxshiroqdir va past tezlikda suratga olish qurilmalari uchun ustuvorlik sig'im va og'irlik nisbati hisoblanadi, chunki har qanday holatda strukturani ortiqcha yuklab bo'lmaydi. Foydali qo'shimcha - batareya zaryadlash monitori. Tanlangan turdagi akkumulyator (litiy-ion yoki lityum-polimer) uchun maxsus muvozanat zaryadlovchisiz ishlay olmaysiz.
- Samolyotni boshqarish uchun parvoz boshqaruvchisiga ulanadigan qabul qiluvchi modulli boshqaruv paneli. Boshqaruv panelining turi boshqaruvning qulayligini va boshqa mavjud funktsiyalarni belgilaydi.
- Qo'shimcha variantlar kelajakdagi qurilmaning maqsadiga qarab tanlanadi. Shunday qilib, kamera stabilizatorlari ko'pincha suratga olish uchun dronlarga biriktiriladi va poygachilar FPV (birinchi shaxs tomonidan ko'rish) kompleksisiz mumkin emas.
Yig'ish uchun sizga bir nechta asboblar kerak bo'ladi - ramkani yig'ish uchun tornavida, lehim temir va, albatta, u bilan ishlash ko'nikmalari.
Ikkinchisining kamchiligini yig'ish jarayonida yo'q qilish oson, xayriyatki, lehim stantsiyasiga ega bo'lishning "aerobatikasi" kerak emas; Va nozik uchi bilan lehim dazmollarini ishlatish yaxshiroqdir.

So'zning to'liq ma'nosida kvadrokopterlar uchun chizmalar yo'q va ular kerak emas. Modullardan yig'ish bu ehtiyojni yo'q qiladi. Sarf materiallari bilan hamma narsa biroz murakkabroq. O'z qo'lingiz bilan kvadrokopterni yig'ish uchun sizga kerak bo'ladi:
- Vintlarning hech biri parvoz tebranishlari tufayli buralib qolmasligi uchun ipni mahkamlang.
- Har bir lehim nuqtasi uchun issiqlik qisqaradigan izolyatsiya.
- Elementlarni tanaga mahkamlash uchun polimer qisqichlar.
- Bosilgan elektron platalar uchun gidroizolyatsiya aralashmasi.
- Motorlar uchun banan konnektorlari.
Yig'ish yoki parvoz sinovlari paytida dizaynga kerakli tuzatishlar va o'zgartirishlar kiritishingizga hech narsa to'sqinlik qilmaydi. Ehtimol, sizning maqsadlaringiz uchun o'z qo'llaringiz bilan oktokopterni yig'ish yaxshiroqdir. Ehtiyotkorlik va ehtiyotkorlik bilan, hatto eng texnik savodsiz dron hobbisi ham uchuvchi dronni qurishi mumkin. Bundan tashqari, kelajakdagi parvoz sinovlari bartaraf etiladigan barcha kamchiliklarni aniqlaydi. Natijada mukammal shaxsiy dron bo'lishi kerak. Asosiysi, uni qo'llash stsenariysini aniq tushunish.
Qurilish jarayoni
Multikopterlarning joylashuvi va dizayni uchun ko'plab variantlar mavjud, ammo eng keng tarqalgani to'rtta pervaneli modellardir. Shu sababli, bunday kvadrokopterni yig'ish yig'ish jarayonini bosqichma-bosqich ko'rib chiqish uchun namuna bo'lib xizmat qiladi. Jarayonda siz tarmoqdan yoki o'zingiz tomonidan tuzilgan kvadrokopterlarning taxminiy chizmalariga tayanishingiz mumkin.
1: ramka qurish
Hajmi yoki maqsadidan qat'i nazar, har bir dronda ramka, ramka va tayanch bazasi bo'lishi kerak. Tayyor ramkalarni yig'ish ular etkazib berilganligi sababli qiyin bo'lmasligi kerak batafsil ko'rsatmalar va barcha kerakli mahkamlagichlar.

Va ramkani o'zingiz yig'ish uchun siz dizayn mahoratingizni ko'rsatishingiz kerak bo'ladi. Metall, plastmassa, metall-plastmassa yoki yog'ochdan tayyorlangan o'z-o'zidan yasalgan kvadrokopter ramkasi etarlicha kuchli bo'lishi kerak. Masalan, o'z-o'zidan yasalgan ramkaning yog'och qismlari qalinligi kamida 30 mm bo'lishi kerak. Kvadrokopteringizni etarlicha kuchli bo'lmagan ramkaga yig'ish - bu kuch sarflashdir, chunki u tez-tez buziladi.
Har qanday holatda, chiqish motorlar tomonidan olib boriladigan va markaziy qo'llab-quvvatlovchi plastinkaga biriktirilgan bir xil uzunlikdagi ma'lum miqdordagi nurlar bo'lishi kerak. Unga qo'nish tayanchlari yoki "oyoqlar" ham o'rnatilgan. Ba'zi konfiguratsiyalarda oyoqlar dvigatellar ostidan "o'sadi". Bularning barchasi kvadrokopter va uning ramkasi chizilgan xususiyatlarga bog'liq.
2: Quvvat bloki va pervanellarni o'rnating
Dvigatellar, ularning boshqaruvchilari va pervanellari tezlik, manevr va boshqa parvoz xususiyatlarida asosiy rol o'ynaydi. Shuning uchun, siz kvadrokopter sanoatida yaqindan ishlaydigan brendlardan mahsulotlarni tanlashingiz kerak, bu bozor segmentida tasodifan tugagan odamdan emas.
Bitta loyiha uchun motorlar bir xil ishlab chiqaruvchidan bir xil modelga ega bo'lishi kerak.
Ha, harakat ularning aylanish tezligidagi farq tufayli sodir bo'ladi, lekin uni qat'iy nazorat qilish kerak. Dvigatellarning rang-barang ekipaji muvozanatni buzadi. Ular "nurlar" ning tashqi uchlariga vintlar bilan biriktirilgan.

Dvigatellardan keyin tezlikni regulyatorlari tayanchlar tekisligiga joylashtiriladi va bog'ichlar bilan mahkamlanadi. Tekshirgichlarni motorlarga, shuningdek, tarqatish platasiga ulash to'g'ridan-to'g'ri lehim va ulagichlar orqali amalga oshiriladi. Agar xohlasangiz va byudjet bo'lsa, siz 4-in-1 kontrollerdan foydalanishingiz mumkin, ammo keyin kvadrokopterning tartibi biroz o'zgaradi. Natijada deyarli tayyor kopter paydo bo'ldi, unda faqat parvoz boshqaruvchisi yo'q.
3: "Miyalarni" o'rnatish
Parvoz boshqaruvchisi odatda samolyot ramkasining tepasida, quvvat taqsimlash paneli va batareya bo'linmasi tepasida o'rnatiladi. Tartibni o'zgartirish mumkin, ammo shuni esda tutish kerakki, tortishish markazi qanchalik past bo'lsa, qurilma shunchalik barqaror bo'ladi.

Parvoz boshqaruvchisining ishlashiga tebranishlarning ta'sirini minimallashtirish uchun uning o'rnatish paneli ko'pincha rezina bo'shliqlarga o'rnatiladi yoki yanada murakkab tebranishlarni to'xtatish tizimlari qo'llaniladi. Dizayn bosqichida u yaxshi imkoniyat butun tuzilishga tuzatib bo'lmaydigan zarar etkazmasdan muhandislik zukkoligingizni ko'rsating.
Tekshirish moslamasi o'rnatilgandan keyingina qolgan komponentlar va modullarni joylashtirish mumkin: boshqaruv panelidan qabul qiluvchi, GPS sensori, magnit kompas, kamera, gimbal va boshqalar.
Va uni faqat tanaga joylashtirishga faqat parvoz boshqaruvchisining dastlabki kalibrlashidan keyin ruxsat beriladi;
Turli ishlab chiqaruvchilar turli kontrollerlar, masofadan boshqarish pultlari va boshqa komponentlarni ishlab chiqaradilar. Shuning uchun ularni kalibrlash alohida ko'rib chiqishga arziydigan murakkab va o'zgaruvchan jarayondir.
Kvadrokopter bir joyda osilib, fotosuratlar va videolar olishi mumkin, shuning uchun ko'plab fotosuratchilar taraqqiyotni kuzatib boradilar va video suratga olish uchun kvadrokopterlarni sotib olishadi.
Kvadrokopterlar texnologik taraqqiyot bilan birga hayotimizga kirib keldi. Bugungi kunda Xitoydan kvadrokopter uchun elektronika buyurtma qilish juda arzon. O'z qo'lingiz bilan kvadrokopter ramkasini hurda materiallardan yig'ish unchalik qiyin emas. Parvoz simulyatorlari yordamida parvoz qilishni o'rganishingiz mumkin. Shunday qilib, asosiy narsa o'z qo'llaringiz bilan kvadrokopter qilish istagiga ega bo'lishdir.
Kvadrokopter uchun tayyor elektronikani sotib olish yaxshidir.
Uy qurilishi kvadrokopterining tafsilotlari
Kvadrokopter uchun motorlar, 4 dona - D2822/14 1450kv

Albatta, kichik kvadrokopterni qo'shimcha xarid qilish biroz qimmatga tushadi, lekin uchish orqali siz uni qanday boshqarishni o'rganasiz va kamera bilan katta kvadrokopterni yiqilmasdan ucha olasiz! Va siz har doim bolaga kichik o'yinchoq bera olasiz.
Va nihoyat, qisqa video kvadrokopterda parvoz qilish, kameradan yozib olish.
Ushbu maqolada biz ishlab chiqarishning asosiy tamoyillarini ko'rib chiqdik uy qurilishi kvadrokopterlari. Agar siz ko'proq bilmoqchi bo'lsangiz, bo'limga qarang
iskra sharhlari:
ekranda tasvirni ko'rsatadigan real vaqt kamerasi bilan 500 metr radiusda uchadigan kvadrokopterni qanday qilish kerak
chelovek sharhlari:
Bolalar, yordam bering!
Men ushbu komponentlar yordamida Arduino Mega platformasida kvadrik qurmoqchiman: