В асинхронных электрических двигателях возникает необходимость регулировки частоты вращения ротора. С этой целью используется частотно-регулируемый привод, основным элементом которого является частотный преобразователь. В его конструкцию входит мост постоянного тока, он же - выпрямитель, преобразующий промышленный переменный ток в постоянный. Другая важная деталь - инвертор, выполняющий обратное преобразование постоянного тока в переменный с необходимой частотой и амплитудой.
Принцип работы частотно регулируемого привода
Асинхронные двигатели широко применяются в промышленности и на транспорте, являясь основной движущей силой узлов, машин и механизмов. Они отличаются высокой надежностью и сравнительно легко поддаются ремонту.
Однако данные устройства могут вращаться только на одной частоте, которую имеет питающая сеть переменного тока. Для работы в различных диапазонах используются специальные устройства - частотные преобразователи, выполняющие регулировку частот до требуемых параметров.
Работа преобразователей тесно связана с принципом действия асинхронного двигателя. Его статор состоит из трех обмоток к каждой из которых подведен электрический ток, создающий переменное магнитное поле. Под действием этого поля в роторе индуцируется ток, который также приводит к возникновению магнитного поля. В результате взаимодействия полей статора и ротора, начинается вращение ротора.
Когда асинхронный двигатель запускается, происходит значительное потребление тока от питающей сети. Из-за этого привод механизма испытывает значительную перегрузку. Наблюдается скачкообразное стремление двигателя достичь номинальных оборотов. В результате, снижается срок службы не только самого агрегата, но и тех устройств, которые он приводит в действие.
Данная проблема успешно решается путем использования частотно регулируемого привода, позволяющего изменять частоту напряжения, питающего двигатель. Применение современных электронных компонентов делает эти устройства малогабаритными и высокоэффективными.

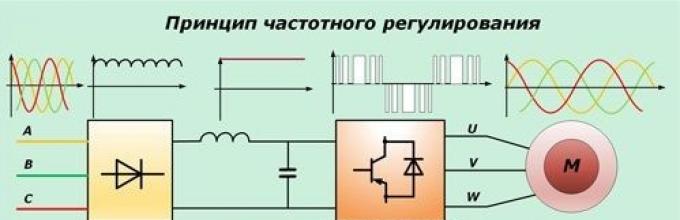
Принцип работы частотного преобразователя достаточно простой. Вначале осуществляется подача сетевого напряжения к выпрямителю, где происходит его трансформация в постоянный ток. Затем он сглаживается конденсаторами и поступает на транзисторный преобразователь. Его транзисторы в открытом состоянии обладают крайне малым сопротивлением. Их открытие и закрытие происходит в определенное время при помощи электронного управления. Происходит формирование напряжения, аналогичного трехфазному, когда фазы смещаются относительно друг друга. Импульсы имеют прямоугольную форму, однако это совершенно не влияет на работу двигателя.
Частотные преобразователи имеют большое значение при работе . При такой схеме подключения необходимо использование фазосдвигающего конденсатора для создания вращающего момента. Эффективность агрегата заметно падает, однако частотный преобразователь увеличить его производительность.
Таким образом, применение частотно регулируемого электропривода делает управление трехфазными двигателями переменного тока более эффективным. В результате, улучшаются производственные технологические процессы, а энергоресурсы используются более рационально.
Преимущества и недостатки устройств регулировки частоты
Данные регулировочные устройства обладают несомненными достоинствами и дают высокий экономический эффект. Они отличаются высокой точностью регулировок, обеспечивают пусковой момент равный максимальному. При необходимости электродвигатель может работать с неполной нагрузкой, что позволяет существенно экономить электроэнергию. Регулировщики частоты заметно продлевают срок эксплуатации оборудования. При плавном пуске двигателя, его износ становится намного меньше.

Частотно регулируемый привод поддается удаленной диагностике по промышленной сети. Это позволяет вести учет отработанных моточасов, распознавать выпадающие фазы во входных и выходных цепях, а также выявлять другие дефекты и неисправности.
К регулировочному устройству могут подключаться различные датчики, которые дают возможность настройки каких-либо величин, например, давления. Если сетевое напряжение неожиданно пропало, включается система управляемого торможения и автоматического перезапуска. Скорость вращения стабилизируется при изменяющейся нагрузке. Частотно регулируемый привод становится альтернативной заменой автоматического выключателя.

В качестве основного недостатка следует отметить создание помех большинством моделей таких устройств. Для обеспечения нормальной работы необходимо устанавливать фильтры высокочастотных помех. Кроме того, повышенная мощность частотно регулируемых приводов значительно поднимает их стоимость, поэтому минимальный срок окупаемости составляет 1-2 года.
Применение регулировочных устройств
Частотно регулировочные устройства применяются во многих сферах - в промышленности и в быту. Ими оборудуются прокатные станы, конвейеры, резательные автоматы, вентиляторы, компрессоры, мешалки, бытовые стиральные машины и кондиционеры. Приводы хорошо зарекомендовали себя в городском троллейбусном транспорте. Использование частотно регулируемых приводов в станках с числовым программным управлением позволяет синхронизировать движения сразу в направлении многих осей.
Максимальный экономический эффект эти системы дают при их использовании в различном насосном оборудовании. Стандартное любых типов заключается в регулировке дросселей, устанавливаемых в напорных линиях и определении числа действующих агрегатов. За счет этого удается получить определенные технические параметры, такие как давление в трубопроводе и другие.

Насосы имеют постоянную частоту вращения и не учитывают изменяющийся расход в результате переменного водопотребления. Даже в случае минимального расхода насосы будут поддерживать постоянную частоту вращения, приводя к созданию избыточного давления в сети и вызывая аварийные ситуации. Все это сопровождается значительным бесполезным расходом электроэнергии. В основном это происходит в ночное время при резком падении водопотребления.
С появлением частотно регулируемого привода появилась возможность поддержки постоянного давления непосредственно у потребителей. Данные системы хорошо зарекомендовали себя в совокупности с асинхронными двигателями общего назначения. Регулировка частоты позволяет изменять скорость вращения вала, делая ее более высокой или низкой по сравнению с номинальной. Датчик давления, установленный у потребителя, передает информацию на частотно регулируемый привод, который, в свою очередь, изменяет частоту, поступающую к двигателю.
Современные регулирующие устройства отличаются компактными размерами. Они размещаются в корпусе, защищенном от пыли и влаги. Благодаря удобному интерфейсу, приборы могут эксплуатироваться даже в наиболее сложных условиях, при широком диапазоне мощности - от 0,18 до 630 киловатт и напряжении 220/380 вольт.
Регулируемый электропривод предназначен для управления двигателем путем контроля параметров. Скорость прямо пропорциональна частоте. Поэтому, варьируя частотой, можно поддерживать скорость вращения вала мотора, заданную согласно технологии. Пошаговое описание рабочего процесса для частотно-регулируемого привода (ЧРП) выглядит примерно так.
- Шаг первый. Преобразование диодным силовым выпрямителем одно- или трехфазного входного тока в постоянный.
- Шаг второй. Контроль преобразователем частоты за крутящим моментом и скоростью вращения вала электродвигателя.
- Шаг третий. Управление выходным напряжением, поддерживание постоянного соотношения U/f.
Устройство, выполняющее на выходе системы обратную функцию генерации постоянного тока в переменный, именуется инвертором. Избавление от пульсаций на шине достигается путем добавления дросселя и конденсатора фильтра.
Как выбрать частотно-регулируемый электропривод
Преобладающее число частотных преобразователей изготавливаются со встроенным фильтром электромагнитной совместимости (ЭМС).
Различаются такие виды управления, как , бездатчиковое и датчиковое векторное, и др. Согласно заданным приоритетам в принятии управленческих решений, приводы выбираются по:
- типу нагрузки;
- напряжению и номиналу двигателя;
- режиму управления;
- регулировки;
- ЭМС и т. д.
Если ЧРП предназначен для асинхронного двигателя с большим сроком эксплуатации, то рекомендуется выбирать частотный преобразователь с завышенным током на выходе.С помощью современных преобразователей частоты возможно управление с пульта, по интерфейсу или комбинированным методом.
Технические особенности применения частотного электропривода
- Для обеспечения высокой производительности можно свободно переключаться на любой режим в настройках.
- Практически все устройства обладают диагностическими функциями, что позволяет быстро устранить возникшую неполадку. Однако рекомендуется в первую очередь проверить настройки, исключить вероятность непроизвольных действий работников.
- Регулируемыйприводможетсинхронизировать конвейерные процессы, либо задавать определённое соотношение взаимозависимых величин. Сокращение оборудования ведёт к оптимизации технологии.
- В состоянии автонастройки параметры двигателя автоматически заносятся в память преобразователя частоты. Благодаря чему повышается точность вычисления момента, и улучшается компенсация скольжения.
Область применения
Производителями предлагается широкий ассортимент приводов, используемых в областях, где задействованы электродвигатели. Идеальное решение для всех видов нагрузки, и вентиляторов. Системы среднего класса используются на угольных электростанциях, в горнодобывающей промышленности, на мельницах, в жилищно-коммунальном хозяйстве и т. д. Диапазон номиналов выглядит таким образом: 3 кВ, 3.3 кВ, 4.16 кВ, 6 кВ, 6.6 кВ, 10 кВ и 11 кВ.
С появлением регулируемого электропривода контроль давления воды у конечного потребителя не вызывает проблем. Интерфейс с продуманной структурой сценариев отлично подходит для управления насосным оборудованием. Благодаря компактной конструкции, привод может быть установлен в шкаф различного исполнения. Продукты нового поколения обладают свойствами передовой техники:
- высокая скорость и точность управления в векторном режиме;
- существенная экономия электроэнергии;
- быстрые динамические характеристики;
- большой низкочастотный вращающий момент;
- двойное торможение и т. д.
Назначение и технические показатели
Комплектные ЧРП напряжением до и выше 1 кВ (предназначенные для приема и преобразования энергии, защиты электрооборудования от токов КЗ, перегрузки) позволяют:
- плавно запускать двигатель, а, следовательно, уменьшать его износ;
- останавливать, поддерживать частоту вращения вала двигателя.
Комплектные ЧРП шкафного исполнения до 1кВ выполняют те же задачи по отношению к двигателям с мощностью 0,55 – 800 кВт. Привод нормально работает, когда напряжение в электросети находится в пределах от -15% до +10%. При безостановочной работе снижение мощности наступает, если напряжение составляет 85%-65%. Общий коэффициент мощности cosj = 0,99. Выходное напряжение автоматически регулируется посредством автоматического включение резерва (АВР).
Преимущества использования
С точки зрения оптимизации и потенциальные преимущества предоставляют возможность:
- регулировать процесс с высокой точностью;
- удалённо диагностировать привод;
- учитывать моточасы;
- следить за неисправностью и старением механизмов;
- повышать ресурс машин;
- значительно снижать акустический шум электродвигателя.
Заключение
Что такое ЧРП? Это мотор-контроллер, который управляет электродвигателем за счет регулировки частоты входной сети, и одновременно защищает агрегат от различных неисправностей (токовой перегрузки, токов КЗ).
Электрические приводы (выполняющие три функции, связанные со скоростью, управлением и торможением) являются незаменимым устройством для работы электродвигателей и других вращающихся машин. Системы активно применяются во многих сферах производства: в нефтегазовой отрасли, атомной энергетике, деревообработке и др.
Регулирование частотным приводом позволяет с помощью специального преобразователя гибко изменять режимы работы электродвигателя: производить его пуск, остановку, разгон, торможение, изменение скорости вращения.
Изменение частоты напряжения питания приводит к изменению угловой скорости магнитного поля статора. Когда частота уменьшается, двигателя снижается, а скольжение увеличивается.
Принцип действия частотного преобразователя привода
Главным недостатком асинхронных двигателей является сложность регулирования скорости традиционными способами: изменением напряжения питания и введением в цепь обмоток дополнительных сопротивлений. Более совершенным является частотный привод электродвигателя. До недавнего времени преобразователи стоили дорого, но появление IGBT-транзисторов и микропроцессорных управляющих систем позволило зарубежным производителям создать доступные по стоимости устройства. Наиболее совершенными сейчас являются статические

Угловая скорость магнитного поля статора ω 0 меняется пропорционально частоте ƒ 1 в соответствии с формулой:
ω 0 = 2π׃ 1 /p,
где p - число пар полюсов.
Способ обеспечивает плавное регулирование скорости. При этом скорость скольжения двигателя не возрастает.
Чтобы получить высокие энергетические показатели двигателя - КПД, коэффициент мощности и перегрузочную способность, вместе с частотой изменяют напряжение питания по определенным зависимостям:
- постоянный момент нагрузки - U 1 / ƒ 1 = const;
- вентиляторный характер момента нагрузки - U 1 / ƒ 1 2 = const;
- момент нагрузки, обратно пропорциональный скорости - U 1 /√ ƒ 1 = const.
Эти функции реализуются с помощью преобразователя, одновременно изменяющего частоту и напряжение на статоре двигателя. Электроэнергия экономится за счет регулирования с помощью необходимого технологического параметра: давления насоса, производительности вентилятора, скорости подачи станка и др. При этом параметры меняются плавно.
Способы частотного управления асинхронными и синхронными электродвигателями
В частотно регулируемом приводе на базе асинхронных двигателей с короткозамкнутым ротором применяются два способа управления - скалярное и векторное. В первом случае одновременно изменяются амплитуда и частота питающего напряжения.

Это необходимо для поддерживания рабочих характеристик двигателя, чаще всего - постоянное отношение его максимального момента к моменту сопротивления на валу. В результате остаются неизменными КПД и коэффициент мощности во всем диапазоне вращения.
Векторное регулирование заключается в одновременном изменении амплитуды и фазы тока на статоре.
Частотный привод типа работает только при небольших нагрузках, при росте которых выше допустимых значений синхронизм может нарушиться.
Достоинства частотного привода
Частотное регулирование обладает целым спектром преимуществ по сравнению с другими способами.
- Автоматизация работы двигателя и производственных процессов.
- Плавный пуск, устраняющий типичные ошибки, возникающие при разгоне двигателя. Повышение надежности привода частотного и оборудования за счет снижения перегрузок.
- Повышение экономичности работы и производительности привода в целом.
- Создание постоянной частоты вращения электродвигателя независимо от характера нагрузки, что важно при переходных процессах. Использование обратной связи дает возможность поддерживать постоянную скорость двигателя при различных возмущающих воздействиях, в частности при переменных нагрузках.
- Преобразователи легко встраиваются в действующие технические системы без существенной переделки и остановки технологических процессов. Диапазон мощностей велик, но с их увеличением существенно возрастают цены.
- Возможность отказаться от вариаторов, редукторов, дросселей и прочей регулирующей аппаратуры или расширить диапазон их применения. За счет этого обеспечивается значительная экономия электроэнергии.
- Устранение вредного действия переходных процессов на технологическое оборудование, типа гидравлических ударов или повышенного давления жидкости в трубопроводах при снижении ее потребления в ночное время.
Недостатки
Как все инверторы, частотники являются источниками помех. В них необходимо устанавливать фильтры.
Стоимость брендов высока. Она значительно возрастает при увеличении мощности аппаратов.
Частотная регулировка при транспортировке жидкостей
На объектах, где производится перекачка воды и других жидкостей, регулировка расхода производится большей частью с помощью задвижек и клапанов. В настоящее время перспективным направлением является применение частотного привода насоса или вентилятора, приводящего в движение их лопасти.

Применение частотного преобразователя как альтернативы дроссельной заслонки дает энергосберегающий эффект до 75 %. Задвижка, сдерживая поток жидкости, не выполняет полезную работу. При этом возрастают потери энергии и вещества на его транспортировку.
Привод частотный дает возможность поддерживать у потребителя постоянное давление при изменении расхода жидкости. От датчика давления поступает сигнал на привод, который изменяет частоту вращения двигателя и тем самым регулирует его обороты, поддерживая заданный расход.
Управление насосными агрегатами производится путем изменения их производительности. Мощность потребления у насоса находится в кубической зависимости от производительности или скорости вращения колеса. Если обороты уменьшить в 2 раза, производительность насоса упадет в 8 раз. Наличие суточного графика потребления воды позволяет определить экономию электроэнергии за этот период, если производить управление частотным приводом. За счет него можно автоматизировать насосную станцию и оптимизировать тем самым давление воды в сетях.

Работа систем вентиляции и кондиционирования воздуха
Максимальный расход воздуха в вентиляционных системах не всегда нужен. Условия функционирования могут потребовать снижения производительности. Традиционно для этого применяется дросселирование, когда частота вращения колеса остается постоянной. Удобней менять расход воздуха за счет частотно регулируемого привода, когда изменяются сезонные и климатические условия, выделение тепла, влаги, паров и вредных газов.
Экономия электроэнергии в системах вентиляции и кондиционирования достигается не ниже, чем у насосных станций, поскольку потребляемая мощность вращения вала находится в кубической зависимости от оборотов.
Устройство частотного преобразователя
Современный частотный привод устроен по схеме двойного преобразователя. Он состоит из выпрямителя и импульсного инвертора с системой управления.

После выпрямления напряжения сети сигнал сглаживается фильтром и поступает на инвертор с шестью транзисторными ключами, где каждый из них подключен к обмоткам статора асинхронного электродвигателя. Блок преобразует выпрямленный сигнал в трехфазный нужной частоты и амплитуды. Силовые IGBT-транзисторы на выходных каскадах обладают высокой частотой переключения и обеспечивают четкий прямоугольный сигнал без искажений. За счет фильтрующих свойств обмоток двигателя форма кривой тока на их выходе остается синусоидальной.
Способы регулирования амплитуды сигнала
Величина выходного напряжения регулируется двумя методами:
- Амплитудный - изменение величины напряжения.
- Широтно-импульсная модуляция - способ преобразования импульсного сигнала, при котором изменяется его длительность, а частота остается неизменной. Здесь мощность зависит от ширины импульса.
Второй способ применяется чаще всего в связи с развитием техники микропроцессоров. Современные инверторы изготавливаются на основе запираемых GTO-тиристоров или IGBT-транзисторов.
Возможности и применение преобразователей
Частотный привод обладает многими возможностями.
- Регулирование частоты трехфазного питающего напряжения от нуля до 400 Гц.
- Разгон или торможение электродвигателя от 0,01 сек. до 50 мин. по заданному закону от времени (обычно - линейному). При разгоне возможно не только снижение, но и увеличение до 150 % динамических и пусковых моментов.
- Реверс двигателя с заданными режимами торможения и разгона до нужной скорости в другом направлении.
- В преобразователях применяется настраиваемая электронная защита от коротких замыканий, перегрузок, утечек на землю и обрывов линий питания двигателя.
- На цифровых дисплеях преобразователей изображаются данные об их параметрах: частоте, напряжении питания, скорости, токе и др.
- В преобразователях настраиваются вольт-частотные характеристики в зависимости от того, какие требуются нагрузки на двигатели. Функции систем управления на их основе обеспечиваются за счет встроенных контроллеров.
- Для низких частот важно применять векторное управление, позволяющее работать с полным моментом двигателя, поддерживать постоянную скорость при изменении нагрузок, контролировать момент на валу. Частотно регулирующий привод хорошо работает при правильном введении паспортных данных двигателя и после успешного проведения его тестирования. Известны изделия компаний HYUNDAI, Sanyu и др.

Области применения преобразователей следующие:
- насосы в системах горячего и холодного водо- и теплоснабжения;
- шламовые, песковые и пульповые насосы обогатительных фабрик;
- системы транспортирования: конвейеры, рольганги и др. средства;
- мешалки, мельницы, дробилки, экструдеры, дозаторы, питатели;
- центрифуги;
- лифты;
- металлургическое оборудование;
- буровое оборудование;
- электроприводы станков;
- экскаваторное и крановое оборудование, механизмы манипуляторов.
Производители преобразователей частоты, отзывы
Отечественный производитель уже начал изготавливать изделия, подходящие для пользователей по качеству и цене. Преимуществом является возможность быстро получить нужный аппарат, а также подробную консультацию по настройке.
Компания "Эффективные системы" производит серийную продукцию и опытные партии оборудования. Изделия применяются для бытового использования, в малом бизнесе и в промышленности. Производитель "Веспер" выпускает семь серий преобразователей, среди которых есть многофункциональные, подходящие для большинства промышленных механизмов.
Лидером по производству частотников является датская компания Danfoss. Ее изделия используются в системах вентиляции, кондционирования, водоснабжения и отопления. Финская компания Vacon, входящая в состав датской, производит модульные конструкции, из которых можно скомпоновать необходимые устройства без лишних деталей, что позволяет сэкономить на компонентах. Известны также преобразователи международного концерна ABB, применяемые в промышленности и в быту.
Если судить по отзывам, для решения простых типовых задач можно применять дешевые отечественные преобразователи, а для сложных нужен бренд, где значительно больше настроек.
Заключение
Привод частотный управляет электродвигателем путем изменения частоты и амплитуды питающего напряжения, при этом защищая его от неисправностей: перегрузок, короткого замыкания, обрывов в питающей сети. Подобные выполняют три основные функции, связанные с разгоном, торможением и скоростью двигателей. Это позволяет повысить эффективность оборудования во многих областях техники.
Описание:
Частотный преобразователь в комплекте с асинхронным электродвигателем позволяет заменить электропривод постоянного тока. Системы регулирования скорости двигателя постоянного тока достаточно просты, но слабым местом такого электропривода является электродвигатель. Он дорог и ненадежен. При работе происходит искрение щеток, под воздействием электроэрозии изнашивается коллектор.Такой электродвигатель не может использоваться в запыленной и взрывоопасной среде.
Асинхронные электродвигатели превосходят двигатели постоянного тока по многим параметрам: они просты по устройству и надежны, так как не имеют подвижных контактов. Они имеют меньшие по сравнению с двигателями постоянного тока размеры, массу и стоимость при той же мощности. Асинхронные двигатели просты в изготовлении и эксплуатации.
Основной недостаток асинхронных электродвигателей – сложность регулирования их скорости традиционными методами (изменением питающего напряжения, введением дополнительных сопротивлений в цепь обмоток).
Управление асинхронным электродвигателем в частотном режиме до недавнего времени было большой проблемой, хотя теория частотного регулирования была разработана еще в тридцатых годах. Развитие частотно-регулируемого электропривода сдерживалось высокой стоимостью преобразователей частоты. Появление силовых схем с IGBT-транзисторами, разработка высокопроизводительных микропроцессорных систем управления позволило различным фирмам Европы, США и Японии создать современные преобразователи частоты доступной стоимости.
Известно, что регулирование частоты вращения исполнительных механизмов можно осуществлять при помощи различных устройств: механических вариаторов, гидравлических муфт, дополнительно вводимыми в статор или ротор резисторами, электромеханическими преобразователями частоты, статическими преобразователями частоты.
Применение первых
четырех устройств не обеспечивает высокого качества регулирования
скорости, неэкономично, требует больших затрат при монтаже и
эксплуатации.
Статические
преобразователи частоты являются наиболее совершенными устройствами управления
асинхронным приводом в настоящее время.
Принцип частотного метода регулирования скорости асинхронного двигателя заключается в том, что, изменяя частоту f1 питающего напряжения, можно в соответствии с выражением
неизменном числе пар полюсов p изменять угловую скорость магнитного поля статора.
Этот способ обеспечивает плавное регулирование скорости в широком диапазоне, а механические характеристики обладают высокой жесткостью.
Регулирование скорости при этом не сопровождается увеличением скольжения асинхронного двигателя, поэтому потери мощности при регулировании невелики.
Для получения высоких энергетических показателей асинхронного двигателя – коэффициентов мощности, полезного действия, перегрузочной способности – необходимо одновременно с частотой изменять и подводимое напряжение.
Закон изменения напряжения зависит от характера момента нагрузки Mс . При постоянном моменте нагрузки Mс=const напряжение на статоре должно регулироваться пропорционально частоте :
![]()
Для вентиляторного характера момента нагрузки это состояние имеет вид:

При моменте нагрузки, обратно пропорциональном скорости:

Таким образом, для плавного бесступенчатого регулирования частоты вращения вала асинхронного электродвигателя, преобразователь частоты должен обеспечивать одновременное регулирование частоты и напряжения на статоре асинхронного двигателя.
Преимущества использования регулируемого электропривода в технологических процессах
Применение регулируемого электропривода обеспечивает энергосбережение и позволяет получать новые качества систем и объектов. Значительная экономия электроэнергии обеспечивается за счет регулирования какого-либо технологического параметра. Если это транспортер или конвейер, то можно регулировать скорость его движения. Если это насос или вентилятор – можно поддерживать давление или регулировать производительность. Если это станок, то можно плавно регулировать скорость подачи или главного движения.
Особый экономический эффект от использования преобразователей частоты дает применение частотного регулирования на объектах, обеспечивающих транспортировку жидкостей. До сих пор самым распространённым способом регулирования производительности таких объектов является использование задвижек или регулирующих клапанов, но сегодня доступным становится частотное регулирование асинхронного двигателя, приводящего в движение, например, рабочее колесо насосного агрегата или вентилятора.
Перспективность
частотного регулирования наглядно видна из
рисунка 1

Таким образом, при дросселировании поток вещества, сдерживаемый задвижкой или клапаном, не совершает полезной работы. Применение регулируемого электропривода насоса или вентилятора позволяет задать необходимое давление или расход, что обеспечит не только экономию электроэнергии, но и снизит потери транспортируемого вещества.
Структура частотного преобразователя
Большинство современных преобразователей частоты построено по схеме двойного преобразования. Они состоят из следующих основных частей: звена постоянного тока (неуправляемого выпрямителя), силового импульсного инвертора и системы управления.
Звено постоянного тока состоит из неуправляемого выпрямителя и фильтра. Переменное напряжение питающей сети преобразуется в нем в напряжение постоянного тока.
Силовой трехфазный импульсный инвертор состоит из шести транзисторных ключей. Каждая обмотка электродвигателя подключается через соответствующий ключ к положительному и отрицательному выводам выпрямителя. Инвертор осуществляет преобразование выпрямленного напряжения в трехфазное переменное напряжение нужной частоты и амплитуды, которое прикладывается к обмоткам статора электродвигателя.
В выходных каскадах инвертора в качестве ключей используются силовые IGBT-транзисторы. По сравнению с тиристорами они имеют более высокую частоту переключения, что позволяет вырабатывать выходной сигнал синусоидальной формы с минимальными искажениями.
Принцип работы преобразователя частоты
Преобразователь частоты
состоит из неуправляемого диодного силового выпрямителя В, автономного инвертора, системы управления ШИМ, системы автоматического регулирования, дросселя
Lв и конденсатора фильтра Cв (рис.2). Регулирование выходной частоты fвых.
и напряжения Uвых осуществляется в инверторе за счет высокочастотного
широтно-импульсного управления.
Широтно-импульсное управление характеризуется периодом модуляции, внутри которого обмотка статора электродвигателя подключается поочередно к положительному и отрицательному полюсам выпрямителя.
Длительность этих состояний внутри периода ШИМ модулируется по синусоидальному закону. При высоких (обычно 2…15 кГц) тактовых частотах ШИМ, в обмотках электродвигателя, вследствие их фильтрующих свойств, текут синусоидальные токи.

Регулирование скорости при этом не сопровождается увеличением скольжения асинхронного двигателя, поэтому потери мощности при регулировании невелики. Для получения высоких энергетических показателей асинхронного двигателя – коэффициентов мощности, полезного действия, перегрузочной способности – необходимо одновременно с частотой изменять и подводимое напряжение.
Структура частотного преобразователя
Большинство современных преобразователей частоты построено по схеме двойного преобразования. Входное синусоидальное напряжение с постоянной амплитудой и частотой выпрямляется в звене постоянного тока B, сглаживается фильтром состоящим из дросселя Lв и конденсатора фильтра Cв, а затем вновь преобразуется инвертором АИН в переменное напряжение изменяемой частоты и амплитуды. Регулирование выходной частоты fвых . и напряжения Uвых осуществляется в инверторе за счет высокочастотного широтно-импульсного управления. Широтно-импульсное управление характеризуется периодом модуляции, внутри которого обмотка статора электродвигателя подключается поочередно к положительному и отрицательному полюсам выпрямителя.

Длительность подключения каждой обмотки в пределах периода следования импульсов модулируется по синусоидальному закону. Наибольшая ширина импульсов обеспечивается в середине полупериода, а к началу и концу полупериода уменьшается. Таким образом, система управления СУИ обеспечивает широтно-импульсную модуляцию (ШИМ) напряжения, прикладываемого к обмоткам двигателя.Амплитуда и частота напряженияопределяются параметрами модулирующей синусоидальной функции. Таким образом, на выходе преобразователя частоты формируется трехфазное переменное напряжение изменяемой частоты и амплитуды.
Мы всегда рады видеть у себя наших старых партнеров и ждем новых.
Доставка во все регионы России!
Частотное регулирование угловой скорости вращения электропривода с асинхронным двигателем в настоящее время широко применяется, так как позволяет в широком интервале плавно изменять обороты вращения ротора как выше, так и ниже номинальных значении.
Частотные преобразователи являются современными, высокотехнологичными устройствами, обладающими большим диапазоном регулирования, имеющими обширный набор функций для управления асинхронными двигателями. Высочайшее качество и надежность дают возможность применять их в различных отраслях для управления приводами насосов, вентиляторов, транспортеров и т.д.
Частотные преобразователи по напряжению питания подразделяются на однофазные и трехфазные, а но конструктивному исполнению на электромашинные вращающиеся и статические. В электромашинных преобразователях переменная частота получается за счет использования обычных или специальных электрических машин. В изменение частоты питающего тока достигается за счет применения не имеющих движения электрических элементов.


Преобразователи частоты для однофазной сети позволяют обеспечить электропривод производственного оборудования мощностью до 7,5 кВт. Особенностью конструкции современных однофазных преобразователей является то, что на входе имеется одна фаза с напряжением 220В, а на выходе - три фазы с тем же значением напряжения, что позволяет подключать к устройству трехфазные электродвигатели без применения конденсаторов.
Преобразователи частоты с питанием от трехфазной сети 380В выпускаются в диапазоне мощностей от 0,75 до 630 кВт. В зависимости от величины мощности устройства изготавливаются в полимерных комбинированных и металлических корпусах.
Самой популярной стратегией управления асинхронными электродвигателями является векторное управление. В настоящее время большинство частотных преобразователей реализуют векторное управление или даже векторное бездатчиковое управление (этот тренд встречается в частотных преобразователях, первоначально реализующих скалярное управление и не имеющих клемм для подключения датчика скорости).
Исходя из вида нагрузки на выходе, преобразователи частоты подразделяются по типу исполнения:
для насосного и вентиляторного привода;
для общепромышленного электропривода;
эксплуатируется в составе электродвигателей, работающих с перегрузкой.

Современные преобразователи частоты обладают разнообразным набором функциональных особенностей, например, имеют ручное и автоматическое управление скоростью и направлением вращения двигателя, а также на панели управления. Наделены возможностью регулирования диапазона выходных частот от 0 до 800 Гц.
Преобразователи способны выполнять автоматическое управление асинхронным двигателем по сигналам с периферийных датчиков и приводить в действие электропривод по заданному временному алгоритму. Поддерживать функции автоматического восстановления режима работы при кратковременном прерывании питания. Выполнять управление переходными процессами с удаленного пульта и осуществлять защиту электродвигателей от перегрузок.

Связь между угловой скоростью вращения и частотой питающего тока вытекает из уравнения
ω о = 2πf 1 /p
При неизменном напряжении источника питания U1 и изменении частоты изменяется магнитный поток асинхронного двигателя. При этом для лучшего использования магнитной системы при снижении частоты питания необходимо пропорционально уменьшать напряжение, иначе значительно увеличатся намагничивающий ток и потери в стали.
Аналогично при увеличении частоты питания следует пропорционально увеличивать напряжение, чтобы сохранить магнитный поток постоянным, так как в противном случае (при постоянном моменте на валу) это приведет к нарастанию тока ротора, перегрузке его обмоток по току, снижению максимального момента.
Рациональный закон регулирования напряжения зависли от характера момента сопротивления.
При постоянном моменте статической нагрузки (Mс = const) напряжение должно регулироваться пропорционально его частоте U1/f1 = const. Для вентиляторного характера нагрузки соотношение принимает вид U1/f 2 1 = const.
При моменте нагрузки, обратно пропорциональном скорости U1/√ f1 = const.
На рисунках ниже представлены упрощенная схема подключения и механические характеристики асинхронного двигателя при частотном регулировании угловой скорости.


Частотное регулирование скорости асинхронного двигателя позволяет изменять угловую скорость вращения в диапазоне - 20...30 к 1. Регулирование скорости асинхронного двигателя вниз от основной осуществляется практически до нуля.
При изменении частоты питающей сети верхний предел частоты вращения асинхронного двигателя зависит от ее механических свойств, тем более что на частотах выше номинальной асинхронные двигатель работает с лучшими энергетическими показателями, чем на пониженных частотах. Поэтому, если в системе привода используется редуктор, это управление двигателем по частоте следует производить не только вниз, но и вверх от номинальной точки, вплоть до максимальной частоты вращения, допустимой но условиям механической прочности ротора.
При увеличении оборотов вращения двигателя выше указанного значения в ею паспорте частота источника питания не должна превышать номинальную не более чем 1,5 - 2 раза.
Частотный способ является наиболее перспективным для регулирования асинхронного двигателя с короткозамкнутым ротором. Потери мощности мри гаком регулировании невелики, поскольку не сопровождаются увеличением . Получаемые при этом механические характеристики обладают высокой жесткостью.







